CANlink mobile 3600 Device Manual

Preamble
Preamble¶
In the following chapter you find general information on the company and on the device manual.
Legal Notice¶
All brands and trademarks named in this document and possibly protected by third-party rights are subject without limitation to the terms of the valid trademark law and intellectual property rights of their respective registered owner.
You can find a list of the free-source and open-source software as well as copyright notes, license texts and, if applicable, the relevant source code on our website under the link: Free & Open Source Software Observe all local and regional laws and provisions as well as the safety instructions contained in this document.
Contact¶
Proemion GmbH
Donaustr. 14 36043 Fulda, Germany
Phone: +49 661 9490-0
Fax: +49 661 9490-111
info@proemion.com
Proemion Corp.
US Subsidiary 241 Taylor St., Suite 301
Dayton, Ohio 45402, USA
Phone: +1 937 558 2211
Fax: +1 937 641 8787
info-dayton@proemion.com
Proemion Ltd.
373 Gangnam-daero Seocho-gu
Seoul, 06621, South Korea
Phone: +82 2 6080 9490
Fax: +82 504 484 9490
info-seoul@proemion.com
Website: Proemion
About This Manual¶
This document is part of the product and provides important information on the intended use, safety, installation, and operation of the devices described below. The document is intended for qualified technicians and electricians with advanced knowledge in electrical engineering and field bus systems, allowing them to estimate the risks and hazards of operating the device and to integrate it into systems with components of other manufacturers.
Safety Levels¶
The safety levels have the following meanings:
Danger
Severe injury or death. Probability: very high
Warning
Severe injury or death. Probability: possible
Note
Indicates notes and information
Other information¶
Tip
Valuable information
Tasks¶
Tasks are structured as follows:
- Aim of the task
- Prerequisites for the described task.
- Step 1.
-
Step 2.
Result of correct performance of the task.
-
Step 3.
Lists¶
Lists are indicated as follows.
- List item
Notations¶
The following notations are used in this document:
| Designation | Representation |
|---|---|
| Keys, commands, messages | Keys, commands, messages |
| Navigation in menus, functions of the user interfaces, file paths | FILE > SAVE > Click OK button |
| Accessories | Cable, adapter |
About the Device
Device Overview¶
This section provides an overview of the device components, identification labels, interfaces, and operating functions.
For additional information, see:
Device Elements¶
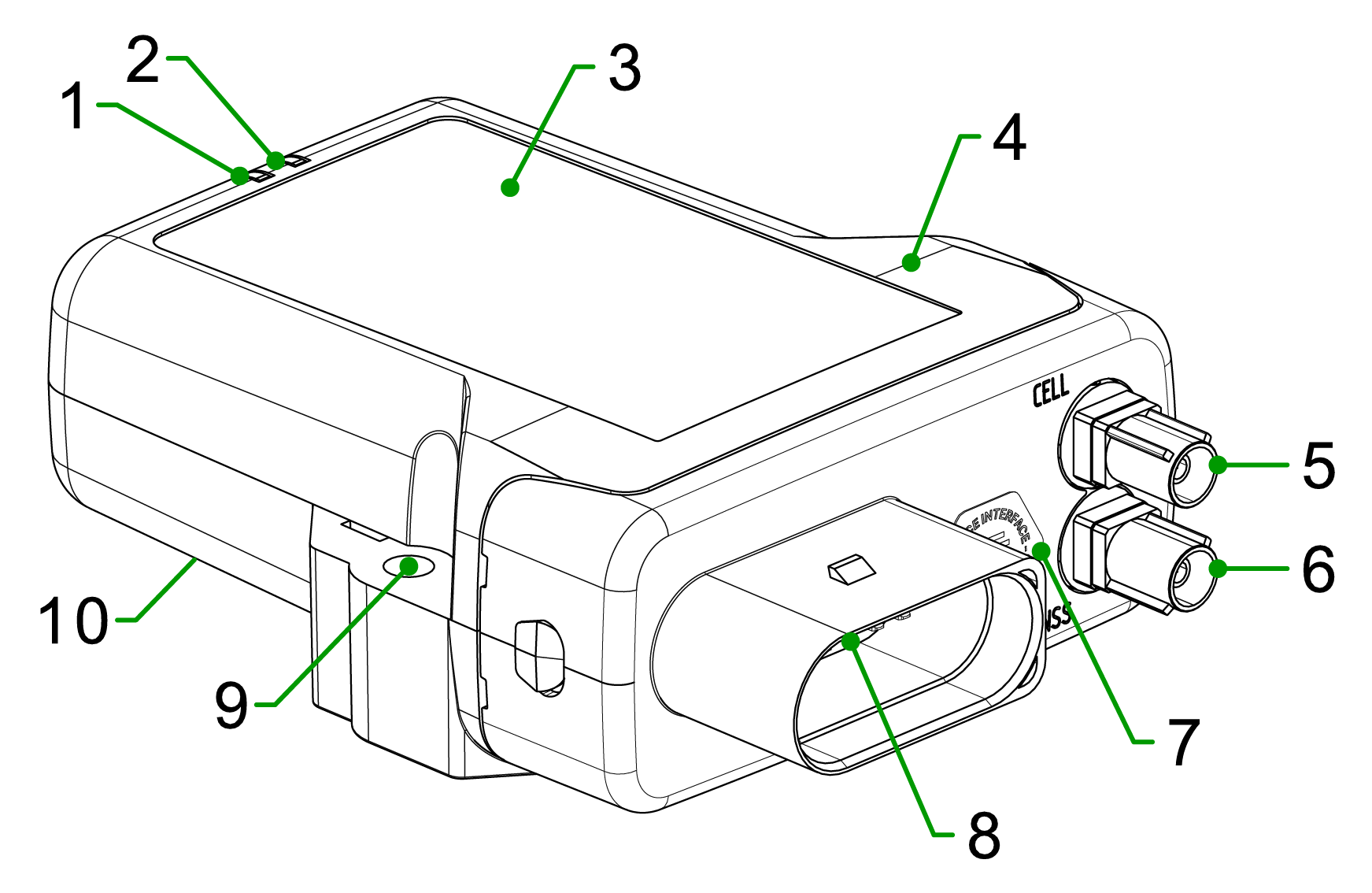
| # | Item |
|---|---|
| 1 | ON LED |
| 2 | STATUS LED |
| 3 | Type label |
| 4 | Housing |
| 5 | Cellular antenna port |
| 6 | GNSS antenna connector |
| 7 | Micro-USB port with protective plug / sticker |
| 8 | Main plug connector |
| 9 | Fixing holes |
| 10 | Back-side label |
Note
Not all types feature the antenna ports. For more information, see Available Model and Types.
Identification & Labels¶
Type Label¶
The device type label is located on the front of the housing and provides the following information:
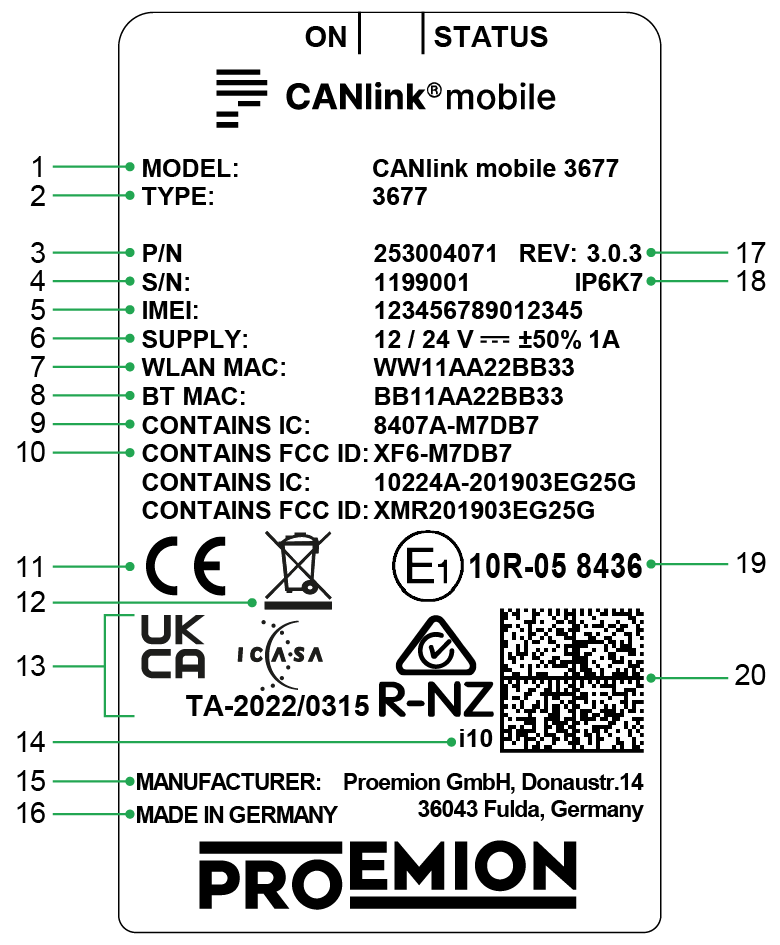
| # | Item |
|---|---|
| 1 | Model designation |
| 2 | Type |
| 3 | Part number |
| 4 | Serial Number |
| 5 | IMEI number |
| 6 | Power supply |
| 7 | WLAN MAC address |
| 8 | Bluetooth MAC address |
| 9 | IC-ID |
| 10 | FCC-ID |
| 11 | CE mark |
| 12 | Disposal symbol |
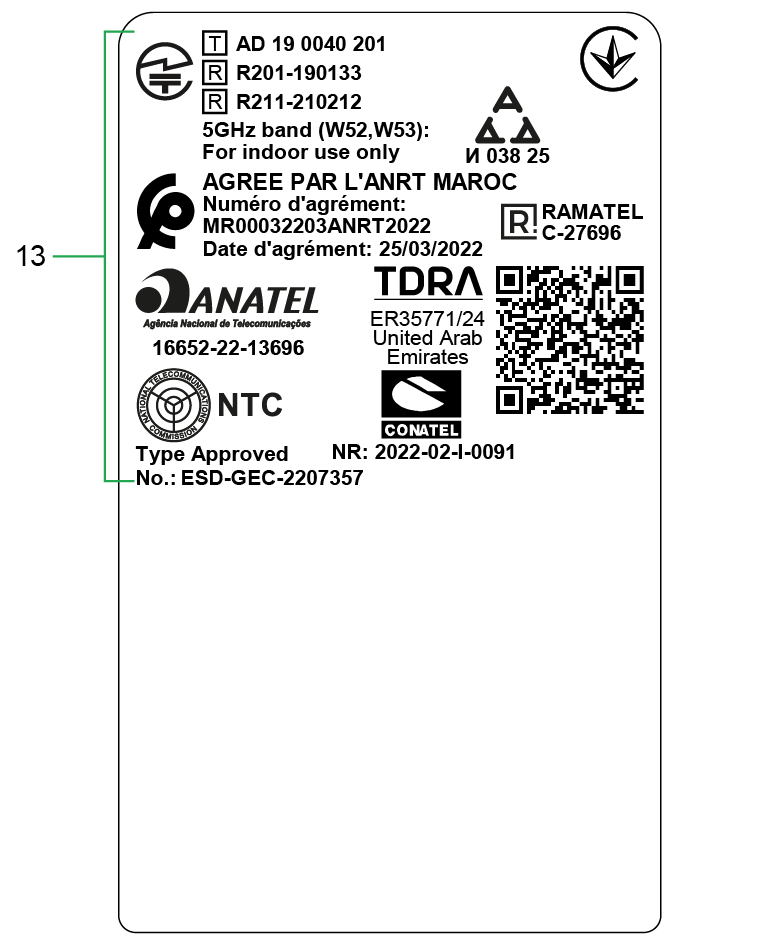
| 13 | Country-specific approvals, see also Back-side label |
| 14 | Product Change Index |
| 15 | Manufacturer address |
| 16 | Country of origin |
| 17 | Hardware version |
| 18 | Protection class |
| 19 | ECE certification mark |
| 20 | Traceability code |
Note
Do not use solvents on the type label, as they may remove or destroy product information.
Back-side Label¶
The back-side label contains additional country-specific approvals.
Traceability Code¶
The traceability code contains the following information. Example:
253004059000000000001815014(I)357520074597168(W)D4CA6E7D0CAA(B)D4CA6E7D0CA9
| Item | Description |
|---|---|
| 9-digit part number: | 253004059 |
| Serial number 0-padded: | 1815014 |
(I) followed by the IMEI Number: |
357520074597168 |
(W) followed by the WLAN MAC Address: |
D4CA6E7D0CAA - only certain types |
(B) followed by the Bluetooth MAC Address: |
D4CA6E7D0CA9 - only certain types |
Note
The device's type label contains important information.
Do not remove the type label!
Interfaces and Connectivity¶
Depending on the device type, the device provides the following interfaces:
- Cellular communication (2G, 3G, 4G; GPRS, EDGE, HSPA, LTE)
- GNSS for positioning data
- Bluetooth, BLE, and Wi-Fi®
- CAN interface via main connector
External antenna ports may be available for cellular communication and GNSS.
Some variants include an integrated battery for temporary backup in case of power failure.
The battery is not intended as a permanent power source.
These interfaces allow connection to external devices such as PCs, smartphones, or tablets for data transmission, visualization, and analysis.
Operating Modes¶
The device supports the following operating modes for wireless CAN data transmission via Bluetooth, Wi-Fi, and BLE:
- CAN-CAN Bluetooth bridge – wireless transmission between two devices
- CAN-Bluetooth interface – connection to a Bluetooth device
- CAN-BLE interface – connection to a BLE central device
Environmental Conditions¶
The device is designed for use in industrial environments as well as in agricultural and forestry machinery.
Protection class IP6K7 is achieved only when all connectors (except the micro-USB port) are properly sealed using appropriate connectors or protection caps.
For installation details, see:
Available Models and Types¶
The available types differ according to the provided interfaces.
With the device, you can log position data and transmit and receive CAN data via a mobile phone network.
The CAN data can be transmitted directly (RealTime diagnostics session) while CAN data is logged and saved and can be transmitted at a later time.
The device can optionally be ordered with the following equipment features:
- wireless module for Wi-Fi®, Bluetooth and BLE
- an integrated battery
- external antenna ports for cellular and position tracking (GNSS)
- CAN2 and CAN3 interface
- Internal nano-SIM card slot for custom nano-SIM card instead of eSIM (available only on request as specific in-house project or in specific device types)
For detailed information on the supported cellular and Wi-Fi® standards as well as the Bluetooth and BLE profiles, see chapter Interfaces.
Available Types for Model 3617
The lead type is 3617.
| Type | Part number | Variant Description | Battery | CAN | Ext. antenna | Wi-Fi®/BT/BLE | Cellular | SIM |
|---|---|---|---|---|---|---|---|---|
| 3617 | 253004334 | Standard | Yes | 3 | No | No | 4G | eSIM |
| 3617 | 253004336 | Var. PLUS+1 | Yes | 3 | No | No | 4G | eSIM |
| 3610 | 1 | Standard | No | 2 | No | No | 4G | eSIM |
| 3611 | 253004083 | Standard | No | 1 | No | No | 4G | eSIM |
| 3611 | 253004335 | Var. PLUS+1 | No | 1 | No | No | 4G | eSIM |
| 3613 | 253004095 | Standard | No | 3 | No | No | 4G | eSIM |
| 3613 | 253004815 | Var. light | No | 3 | No | No | 4G | eSIM |
| 3613 | 253004817 | Var. N-SIM Brazil | No | 3 | No | No | 4G | Nano-SIM Brazil |
| 3613 | 253004810 | Var. N-SIM Türkiye | No | 3 | No | No | 4G | Nano-SIM for Türkiye |
| 3651 | 253004084 | Standard | No | 1 | Yes | No | 4G | eSIM |
| 3651 | 253004338 | Var. PLUS+1 | No | 1 | Yes | No | 4G | eSIM |
| 3653 | 253004096 | Standard | No | 3 | Yes | No | 4G | eSIM |
| 3653 | 253004816 | Var. light | No | 3 | Yes | No | 4G | eSIM |
| 3653 | 253004812 | Var. N-SIM Brazil | No | 3 | Yes | No | 4G | Nano-SIM Brazil |
| 3653 | 253004808 | Var. N-SIM Türkiye | No | 3 | Yes | No | 4G | Nano-SIM Türkiye |
| 3657 | 253004097 | Standard | Yes | 3 | Yes | No | 4G | eSIM |
| 3657 | 253004376 | Var. PLUS+1 | Yes | 3 | Yes | No | 4G | eSIM |
Available Types for Model 3677
The lead type is 3677.
| Type | Part number | Variant Description | Battery | CAN | Ext. antenna | Wi-Fi®/BT/BLE | Cellular | SIM |
|---|---|---|---|---|---|---|---|---|
| 3677 | 253004071 | Standard | Yes | 3 | Yes | Yes | 4G | eSIM |
| 3677 | 253004092 | Var.N | Yes | 3 | Yes | Yes | 4G | Nano (internal) |
| 3677 | 253004339 | Var. PLUS+1 | Yes | 3 | Yes | Yes | 4G | eSIM |
| 3633 | 253004081 | Standard | No | 3 | No | Yes | 4G | eSIM |
| 3630 | 1 | Standard | No | 2 | No | Yes | 4G | eSIM |
| 3637 | 253004070 | Standard | Yes | 3 | No | Yes | 4G | eSIM |
| 3637 | 253004337 | Var. PLUS+1 | Yes | 3 | No | Yes | 4G | eSIM |
| 3673 | 253004082 | Standard | No | 3 | Yes | Yes | 4G | eSIM |
Scope of Delivery¶
- CANlink mobile 36xx
- "Instruction Sheet" with brief CE declaration
Launch Kit¶
The launch kit contains all hardware components required for putting the CANlink mobile into operation. Before you can use the DataPlatform, you must obtain the corresponding access. This access must be a component of the quotation and finally of the sales order.
Included material in the 36xx Launch Kit (without Proemion Account Setup) - part number 253000176:
-
CLM 3600 Starter cable
-
PCAN-USB - CAN/USB Interface
-
CAN bus terminator D-Sub/D-Sub, 120Ω
-
Power supply unit with set of connectors (US, EU, UK, AU)
-
USB cable (debugging, diagnosis)
-
Mounting kit M5 housing GH120x
-
Antenna LTE GNSS DA 3M0 FAKRA-D FAKRA-C FAR
-
CANlink mobile 3000 Plug-Kit
-
Cable MTII 14pin code1 14open 2m
Software and Accessories¶
The software can be downloaded from our Download Center under: 03_Proemion Tools Software > 01_Software.
| Software | Part Number |
|---|---|
| Proemion Configurator | Download-Center |
| CANlink mobile 3000 DeviceAnalyzer | Download-Center |
| Remote Service Tool | Download-Center |
| Proemion Firmware Programmer | Download-Center |
| Proemion Machine Companion App | Google Play |
| Proemion DataPlatform Setup | 259003021 |
| Material | Part Number |
|---|---|
| PCAN-USB - CAN/USB Interface CAN-PC communication gateway for configuration and test purpose | 257001041 |
| CANlink Connector Kit MT II 14-pin socket housing, 14x MT II contact type A, 14x MT II gray single-wire sealing, 14x dummy plugs only for machine processing, refer to Connector Kit Datasheet for further information | 132600031 |
| ERGOCRIMP HAND TOOL 539635-1 without die-set Hand Tool required for assembling the Connector Kit | Direct order at supplier |
| ERGOCRIMP DIE SET for MICRO Timer and Micro Timer (SWS) 539663-2 Micro Timer | Direct order at supplier |
| MT2 A REC 1.6 Contact SWS Sn (LP) for crimping with hand tool Crimping Hand Tool | Direct order at supplier |
| CAN bus termination, D-Sub/D-Sub CAN 120 Ohm | 157000033 |
| USB cable, USB-A to Micro-USB-B, 1.6 m USB cable for debugging / diagnosis | 136000138 |
| MT II socket, 14-pin, cod.1, open, 30 cm Connection cable for main plug connector, 14-pin with open cable, 0.3m | 136000188 |
| MT II socket, 14-pin, cod.1, open, 2 m Connection cable for main plug connector, 14-pin with open cable ends, 2 m | 136000198 |
| Adapter Cable CANlink 14p-M12 5p 0,3m Adapter cable MT II 14-Pin - M12, 5-Pin, 0.3 m long | 136200001 |
| Adapter Cable CANlink 14p-M12 12p 0,3m Adapter cable MT II 14-Pin - M12, 12-Pin, 0.3 m long | 136200002 |
| CLM3600 Starter Cable 6open 3dsub 1pw 2m (starter_cable_for_main_plug_connector) Cable for initial startup with complete connector assignment for main plug connector, 14-pin, ready-to-use, 2 m long | 136000202 |
| ANT LTE GNSS DA 3M0 FAKRA-D FAKRA-C FA (Shark_fin) GNSS / Cellular antenna | 157000109 |
| ANT LTE GNSS DA 3M0 FAKRA-D FAKRA-C FAR (Flat_Rectangle) GNSS / Cellular antenna | 157000121 |
| Mounting kit M5 housing GH120x fixing set | 141000017 |
| Power supply unit, US EU UK AU 24V/0.83A/20W Power supply unit without AC plug 24 V 0,83 A 20 W, plug adapter set (US, EU, UK, AU), adapter DC 5.5x2 mm BU / 3.5x1.35 mm ST | 257004007 |
| CANlink® mobile Opening Tool for GH1209 housings (see CANlink mobile Opening Tool manual) | 157012001 |
CANlink® mobile light¶
With the CANlink® mobile light, Proemion offers a concept to new customers who want to gradually adapt to a telematics system.
The CANlink® mobile light has a lower starting price and the same properties as any device from the CANlink® mobile, i.e. the same hardware, firmware and configuration.
CANlink® mobile light devices are tied to certain hosting plans that limit the amount of data and features available to those CUs.
The CU can be later upgraded in the DataPortal to access less limited hosting plans by paying an additional one-time fee, see CANlink® mobile light Upgrade.
Safety Instructions
Safety Instructions¶
This section contains safety instructions that must be followed to prevent injury, death, or damage to the device.
Intended Use¶
The device is designed for use in industrial environments as well as in earth-moving machinery.
The device is not intended for safety-related applications.
Foreseeable Misuse¶
The device must not be used in the following ways:
- Use in safety-related or safety-critical applications (e.g. according to ISO 26262)
- Use in potentially explosive atmospheres
- Use as a permanent power source via the internal battery
- Cleaning with high-pressure equipment (e.g. pressure washer)
- Any use outside the specified environmental and operating conditions
Qualified Personnel¶
The device must only be installed, commissioned, and serviced by qualified personnel.
Qualified personnel are trained technicians or electricians with knowledge of:
- Electrical systems
- Fieldbus communication (e.g. CAN)
- Applicable safety regulations
Personnel must have read and understood this documentation and have access to it at all times.
The responsible organization must ensure that only qualified personnel work with the device.
Functional Safety Restrictions¶
DANGER: Use in safety-related applications
Risk of severe or fatal injury.
The device operates using wireless communication. Data transmission cannot be guaranteed at all times due to possible network limitations, interference, or device malfunctions. The device is not designed, certified, or authorized for use in functional safety or safety-related applications (e.g. according to ISO 26262). Any failure, misconfiguration, or misuse may lead to malfunction of safety-critical systems.
- Never use this device in applications where human safety depends on its correct operation.
- Never use the device to influence or interfere with safety-relevant communication (e.g. powertrain CAN or other safety-related networks).
- The system integrator is responsible for ensuring that the device does not affect safety functions.
- Do not rely on wireless communication for critical or safety-relevant data transmission.
Explosion and Hazardous Environments¶
DANGER: Explosion hazard
Risk of severe or fatal injury.
Operation of electrical equipment in potentially explosive atmospheres may cause ignition.
- Observe all applicable regulations for hazardous areas.
- Do not install antennas near flammable substances (e.g. fuel tanks).
Aircraft Restrictions¶
DANGER: Interference with aircraft systems
Risk of severe or fatal injury.
Radio frequency emissions may interfere with aircraft communication systems.
- Disconnect the power supply before entering an aircraft.
- Ensure the device cannot be switched on during flight.
Electrical Safety¶
WARNING: Electric shock
Risk of severe or fatal injury.
- Do not use the device if there is visible damage.
- Do not open or repair the device.
- Repairs must only be carried out by the manufacturer.
Radio Frequency (RF) Exposure¶
WARNING: RF exposure and interference
Risk of severe or fatal injury.
Radio frequency emissions may interfere with medical and electronic equipment.
- Keep a minimum distance of 20 cm between antennas and persons.
- Do not operate the device near medical equipment (e.g. pacemakers) without verifying compatibility.
- Follow local regulations in hospitals and sensitive environments.
Installation and Power Supply Risks¶
WARNING: Improper installation or power supply
Risk of injury or device damage.
- Installation must be performed by qualified personnel.
- Protect the power supply circuit with an external 2 A fuse.
- Disconnect all connections before working on the device.
Mechanical Protection¶
Risk of property damage
The device is protected against mechanical impacts according to class IK07 (IEC 62262, impact energy 2 joules).
- If higher protection is required, additional external protection must be provided.
- If necessary, install external protection measures such as protective housings or shields to protect the device from external influences (e.g. water spray or mechanical impact).
Device Integrity and Handling¶
Risk of property damage
Improper handling may lead to device malfunction or damage.
- Do not use damaged cables or connectors.
- Ensure all connections are correctly assigned and not forced.
- Do not expose the device to solvents.
- Do not immerse the device in liquids.
- Ensure all connectors are properly sealed to maintain protection class (IP).
Cleaning and Environmental Limits¶
Risk of property damage due to water exposure
The device is resistant to water jets according to IPxK5. Higher pressure or flow rates may cause damage.
- Do not clean the device with a pressure washer.
Antenna Placement¶
Interference due to incorrect antenna positioning
Improper antenna placement may reduce performance or cause interference.
- Maintain a minimum distance of at least 1/4 wavelength between antennas.
- Avoid distances that are multiples of the wavelength.
- Do not operate antennas together with other transmitters unless properly evaluated.
Features
The following sections contain information on device functionality and features. It provides details of the operating modes, connectors, cables, pin assignments, interfaces and indicator elements.
Functions¶
The following functions apply to all types, i.e. are included in all devices of these types:
- Cellular (4G)
- Online (RealTime)
- Online (Logging)
- Input/output functions
- Acceleration sensor
- Gyro sensor
- GNSS
- eSIM card
The following functions apply to the types as follows:
| Function | 36101 | 3611 | 361334 | 3617 | 36301 | 3633 | 3637 | 3651 | 365334 | 3657 | 3673 | 36772 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CAN-CAN Bluetooth/Wi-Fi®/BLE bridge | No | No | No | No | Yes | Yes | Yes | No | No | No | Yes | Yes |
| CAN-Bluetooth/Wi-Fi®/BLE interface | No | No | No | No | Yes | Yes | Yes | No | No | No | Yes | Yes |
| CAN-BLE Peripheral | No | No | No | No | Yes | Yes | Yes | No | No | No | Yes | Yes |
| Battery | No | No | No | Yes | No | No | Yes | No | No | Yes | No | Yes |
| Antenna (internal/external) | int. | int. | int. | int. | int. | int. | int. | ext. | ext. | ext. | ext. | ext. |
| CAN bus interfaces | 1 | 3 | 3 | 3 | 3 | 1 | 3 | 3 | 3 | 3 |
-
The device types 3610 and 3630 are customized types for certain OEMs only. ↩↩
-
The CANlink® mobile 3677 is optionally available as a customer-specific type with a push-pull Nano-SIM card slot instead of an integrated eSIM card. ↩
-
The CANlink® mobile 3613 and 3653 are optionally available as a country-specific type for permanent operation in Türkiye. These are equipped with a special SIM card "Nano-SIM card Türkiye" instead of an integrated eSIM card (both device variants are equipped with the standard firmware). ↩↩
-
The CANlink® mobile 3613 and 3653 is also optionally available as a country-specific type for permanent operation in Brazil. It is equipped with a special SIM card "Nano-SIM card Brazil" instead of an integrated eSIM card (this device variant is equipped with the standard firmware). ↩↩
Modes and I/O
Online Mode¶
The CANlink® mobile 3600 uses the Online mode connection type, which combines the functionality of both Logging and Realtime modes.
Note
The Online mode replaces the previously separate Logging and Realtime modes that are only used in some legacy devices.
In the DataPortal user manual you find further information on Connection Types to the DataPlatform.
Device functionality¶
The device records CAN messages, GNSS data and internal variables, such as the values of the acceleration or gyro sensors like in the former Logging mode. In detail this means:
-
All the recorded data is saved in an internal, nonvolatile memory and automatically sent to the DataPlatform when a connection is available.
-
The device can be used to record process data, such as machine parameters, during ongoing operation via CAN interfaces.
-
Depending on the device features, custom data be logged into the internal storage. Examples of sources for data to be stored are the GNSS receiver values, the input/output functions, etc. The logged data is then sent to the DataPlatform.
For details on the data storage on DataPlatform and time series data handling, read Time Series Handling in the DataPortal User Manual.
Note that there is the possibility to block incoming Realtime sessions, see note below.
At the same time, CAN messages can be transmitted bidirectionally like in the former Realtime mode. In detail this means:
-
CAN messages and GNSS data can be transmitted in real-time.
-
CAN interfaces on the device are used to transmit process data such as machine parameters during ongoing operations via Bluetooth/Wi-Fi® or BLE, the mobile network and the DataPlatform.
-
Depending on the device features, custom CAN messages can be sent to the device CAN bus.
Data to be sent can be generated from different sources (ex. GNSS receiver values,input/output functions, etc.). -
Alternatively, the device can use a Wi-Fi®, Bluetooth or BLE connection to receive/send data from/to an external receiver, e.g. the CANlink wireless, and have bidirectional communication between two local CAN interfaces.
-
Data is transmitted constantly and can be evaluated in real-time. This function requires a permanent connection between the device and the user software or the DataPlatform.
Note
There is the possibility to block incoming Realtime sessions through Wi-Fi®, Bluetooth, BLE or mobile via the object 0x3333:0x2B when >0 which can be set via the configuration or via the CANopen object dictionary from any external source.
Input/Output Functions¶
The device is equipped with an additional input/output functions (3 analog inputs, 1 digital output).
You can use the input function for instance to log status information from devices or machines as well as to directly determine and monitor switch and key states.
The data determined from the input/output functions can be visualized or forwarded via the CAN bus.
Connectivity
Cellular Interface¶
The device is equipped with a Cellular interface for mobile data transmission.
Depending on the type, the device supports the 3G or 4G mobile network. To achieve greater network coverage, all types feature a fallback function to a different mobile network. The types 3610, 3611, 3613, 3617, 3651, 3653, 3657, 3630, 3633, 3673, 3637, and 3677 support 2G, 3G and 4G. The device detects the mobile network with the best transmission speed and automatically changes to the corresponding mobile network.
You can use the mobile interface to transmit data bidirectionally via the mobile network.
Note on the integrated antenna for types 3610, 3611, 3613, 3630, 3633 and 3637
Due to the physical limited size of the enclosure, the integrated main and diversity antennas will have limited efficiency in the LTE-Low-Bands below 800MHz.
For applications mainly operating in these LTE-Low-Bands, it is recommended to use a CANlink mobile 3600 type with an external antenna, such as type 3651, 3653, 3657, 3673 or 3677.
BLE Interface¶
Some devices are equipped with a Bluetooth Low Energy (BLE) interface.
Such devices support two modes of operation:
-
Gateway mode: The device operates as a BLE peripheral and provides access to CAN data to any connecting BLE central device such as a PC, smartphone, or tablet.
-
CAN‑CAN‑BLE bridge mode: Two Proemion devices connect via BLE to wirelessly forward CAN traffic between their CAN networks. One device operates as BLE peripheral, the other as BLE central.
While both modes are supported, BLE’s limited bandwidth makes the gateway mode ideal for diagnostic or monitoring use cases, whereas BLE bridges are recommended only for low‑traffic scenarios. For higher CAN loads, Wi‑Fi or Bluetooth Classic bridges provide better performance.
Note
BLE prioritizes low power consumption over data throughput and does not guarantee data delivery. BLE is not suitable for high-bandwidth CAN traffic. For high CAN bus loads, use a Wi-Fi-based or Bluetooth Classic–based CAN bridge.
The following table lists device families and the minimum firmware version required for BLE support.
| Device family | Minimum firmware version with BLE support |
|---|---|
| CANlink® wireless 4000 | v2.0 |
| CANlink® mobile 3600 | v4.1.1 |
Terminology¶
This table defines terminology used in this documentation.
| Term | Description |
|---|---|
| BLE | Bluetooth Low Energy. A wireless technology optimized for short range and low power consumption. |
| central | A BLE role that initiates connections (for example, a smartphone or PC). Also referred to as client in configuration objects. |
| peripheral | A BLE role that advertises services and accepts connections (for example, a Proemion device). Also referred to as server in configuration objects. |
| service | A collection of BLE characteristics exposed by a peripheral. |
| characteristic | A data endpoint within a BLE service used to read, write, or notify data. |
| PHY mode | BLE physical layer configuration that affects speed, range and transmission reliability. |
| CAN-CAN-BLE bridge mode | Operating mode in which two Proemion devices connect via BLE to wirelessly forward CAN traffic between their CAN networks. |
| Gateway mode | Operating mode in which the device acts as a BLE peripheral and provides CAN data to any connecting BLE central device such as a PC, smartphone, or tablet. |
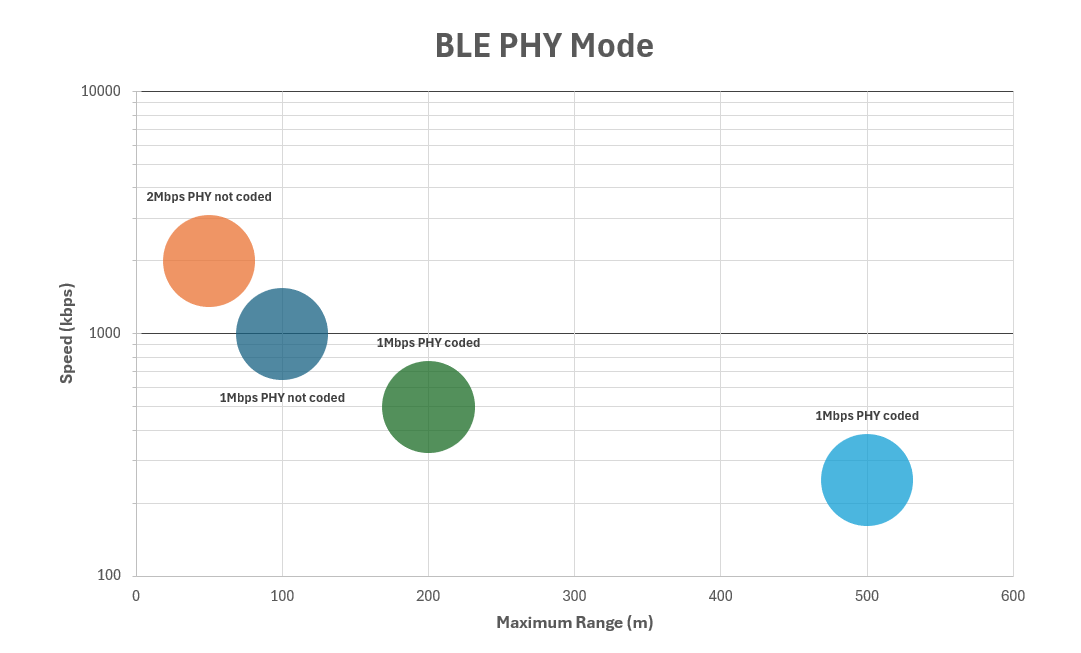
BLE PHY Configuration¶
This section covers the Physical Layer (PHY) mode, which defines the BLE radio’s physical transmission characteristics and has a major impact on speed and range.
As a reference, a throughput of approximately 400 CAN messages per second in one direction can be expected. Actual throughput depends on the selected PHY mode, buffer configuration, and CAN bus load.
The PHY mode can be configured using the 0x3009:0x0A [BLE PHY Mode] object.
The default setting is 0 ( 1 Mbps, not coded).
Note
The PHY mode is configured by the BLE central device.
For Proemion devices, this setting must be applied on the client.
0x3009:0x0A setting |
PHY mode | Speed | Range (approx.) | Typical use |
|---|---|---|---|---|
0 default |
1 Mbps, not coded | 1 Mbps | ~100m | Balanced default |
1 |
2 Mbps, not coded | 2 Mbps | ~50m | High data throughput |
2 |
1 Mbps, coded | 500 kbps | ~200m | Long range, robust connection |
3 |
1 Mbps, coded | 125 kbps | ~500m | Long Range, low bandwidth |
The coded PHY modes trade data throughput for increased range and robustness. They provide longer range and improved reliability in noisy environments compared to the non-coded PHY modes. The coded PHY modes significantly limit available throughput but at the same time it increases transmission reliability.
A PHY mode change is initiated by the BLE central device and must be supported by both the central and the peripheral.
BLE whitelist¶
The BLE whitelist restricts incoming BLE connections to devices explicitly listed in a predefined allow list. It provides a simple access control mechanism for BLE connections.
The whitelist is evaluated only when BLE is enabled (0x3008:0x09 [BLE Enable]).
Enable the whitelist¶
The whitelist is enabled by default.
By default, 0x3009:0x0B [BLE Whitelist - Enable] is set to 1, which enables whitelist enforcement.
When enabled, the device accepts BLE connection requests only from devices listed in the whitelist.
Up to eight whitelist entries are available.
Each whitelist entry defines a DeviceName for which incoming connection requests are accepted.
The DeviceName must be between 4 and 25 bytes long.
On CANlink® wireless 4000 and CANlink® mobile 3600 devices, the DeviceName corresponds to the value of 0x3009:0x05 [BLE Devicename] on the connecting device.
DeviceName for whitelist comparison are limited to 15 characters and must match exactly, or use the device's MAC address.
Info
For non-Proemion devices, the DeviceName typically corresponds to the device name reported by the operating system.
On Windows systems, the DeviceName typically matches the computer name.
You can find this value under Settings > System > About.
Important
When the whitelist is enabled, only devices listed in the whitelist can establish a BLE connection.
DeviceName for whitelist comparison are limited to 15 characters and must match exactly, or use the device's MAC address.
The following objects define the available whitelist entries:
| Object Index | Object Name |
|---|---|
0x3009:0x0C |
BLE Whitelist - Entry 1 |
0x3009:0x0D |
BLE Whitelist - Entry 2 |
0x3009:0x0E |
BLE Whitelist - Entry 3 |
0x3009:0x0F |
BLE Whitelist - Entry 4 |
0x3009:0x10 |
BLE Whitelist - Entry 5 |
0x3009:0x11 |
BLE Whitelist - Entry 6 |
0x3009:0x12 |
BLE Whitelist - Entry 7 |
0x3009:0x13 |
BLE Whitelist - Entry 8 |
Warning
All whitelist entries are empty by default. Because the whitelist is enabled by default, this configuration rejects all incoming BLE connection requests. This behavior is intentional and provides a secure default configuration.
Since the whitelist has 8 entries, up to 8 distinct devices can be authorized. By default, no BLE connection requests are accepted because the whitelist is enabled and contains no entries.
Disable the whitelist¶
With 0x3009:0x0B [BLE Whitelist - Enable] set to 0, whitelist enforcement is disabled.
In this state, any BLE device requesting a connection is accepted.
Warning
Disabling the BLE whitelist removes access control for incoming BLE connections.
When the whitelist is disabled using 0x3009:0x0B [BLE Whitelist - Enable], any BLE central device can establish a connection.
Disable the whitelist only if other measures ensure that unauthorized devices cannot reach the BLE connection range.
This may be acceptable in environments with physical access restrictions, such as controlled or enclosed areas.
BLE peripheral¶
When operating as a BLE peripheral, the device advertises services that expose data endpoints, referred to as characteristics. A BLE central device scans and connects to the peripheral to exchange the data.
Proemion bridge service¶
The Proemion bridge service is the BLE service used to exchange CAN data. A BLE central device scans for this service, connects to it, and uses it for data transfer.
The service UUID is:
CAEC2DB0-0000-426D-B4FB-61B67CE2054C
The service exposes two characteristics.
| Characteristic UUID | Name | BLE properties | Description |
|---|---|---|---|
CAEC2DB0-0001-426D-B4FB-61B67CE2054C |
ReceiveData | WriteWithoutResponse | Receives data sent from the central device to the peripheral. |
CAEC2DB0-0002-426D-B4FB-61B67CE2054C |
TransmitData | Notify | Sends data from the peripheral to the central device using notifications. |
After connecting to the service, the central device can:
- Subscribe to notifications on the
TransmitDatacharacteristic. - Write data to the
ReceiveDatacharacteristic.
Data sent by the device is delivered to the central as BLE notifications.
Data sent by the central device is written to the ReceiveData characteristic.
Note
All data is transferred using the Proemion Byte Command Protocol.
For more information, see Byte Command Manual.
Configure device as a BLE peripheral¶
To operate the device as a BLE peripheral, configure the CANopen objects listed below. This configuration enables gateway operation between the CAN network and a BLE central device.
After applying the configuration, restart the device to activate BLE advertising.
| Object | Name | Value | Notes |
|---|---|---|---|
0x3008:0x02 |
WLAN Enable | 0 |
Disabled |
0x3008:0x09 |
BLE Enable | 1 |
Enabled |
0x3004:0x07 |
BLE Client Enable (central) | 0 |
Disable |
0x3003:0x07 |
BLE Server Enable (peripheral) | 1 |
Enabled |
0x3009:0x05 |
BLE Devicename | CLM3600 BLE |
Set a unique name for the peripheral |
Ensure that the device is configured with a valid and unique CANopen Node ID for the CAN network. After the next restart, the device advertises the Proemion bridge service and is ready to accept BLE connections.
CAN-CAN-BLE bridge¶
A CAN-CAN-BLE bridge provides a wireless connection between two CAN networks using BLE. This configuration can be used as a substitute for CAN cabling in low-traffic scenarios, such as drag chains or remote control units.
Due to limited bandwidth, a BLE-based CAN-to-CAN bridge is not suitable for high CAN bus loads.
Configure a CAN-CAN-BLE bridge¶
To configure a CAN-CAN-BLE bridge, one device operates as a BLE central and the other as a BLE peripheral. Configure the CANopen objects as shown below.
| Object | Name | BLE central | BLE peripheral | Notes |
|---|---|---|---|---|
0x3008:0x02 |
WLAN Enable | 0 Disabled |
0 Disabled |
Must be disabled before enabling BLE |
0x3008:0x03 |
Bluetooth Enable | 0 Disabled |
0 Disabled |
Must be disabled before enabling BLE |
0x3008:0x09 |
BLE Enable | 1 Enabled |
1 Enabled |
Enables the BLE subsystem |
0x3009:0x0B |
BLE Whitelist - Enable | - | 0 Disabled |
For testing, allows connection from any central device. In production, it is highly recommended to enable the whitelist and add the central DeviceName as described here |
0x3009:0x05 |
BLE Devicename | - | CLM3600 LE |
Specify a unique name for the peripheral |
0x3004:0x08 |
Remote BLE server name or MAC | CLM3600 LE |
- | On the central this must match the peripheral device name or MAC address (on the peripheral this can be ignored) |
0x5020:0x.. and 0x5022:0x.. and 0x5024:0x.. |
CAN filter | ... | ... | On both, central and peripheral, the CAN filters have to be configured appropriately, see Filter received CAN messages |
The above configuration is already sufficient for a connectivity test. Optionally, you can apply a whitelist entry using the following example configuration:
| Object | Name | BLE central | BLE peripheral | Notes |
|---|---|---|---|---|
0x3009:0x0B |
BLE Whitelist - Enable | - | 1 Enabled |
Enable whitelist enforcement |
0x3009:0x05 |
BLE Devicename | ProemionCentral |
(as above) | Set a unique name for the central device |
0x3009:0x0C |
BLE Whitelist - Entry 1 | - | ProemionCentral |
Allow the central device to connect |
After configuration and reboot, the BLE central device scans for and connects to the BLE peripheral specified in 0x3004:0x08.
CAN-CAN Bluetooth/Wi-Fi Bridge¶
In operation as a CAN-CAN Bluetooth/Wi-Fi bridge (types 3630, 3633, 3673, 3637, 3677), CAN data is transmitted wirelessly between two CANlink mobile or CANlink wireless devices via a Bluetooth or Wi-Fi connection.
The CAN-CAN Bluetooth/Wi-Fi bridge acts as a substitute for CAN cables, e.g. in cable carriers or with remote-control units.
Bluetooth PIN-based paring for security is enabled by setting 0x3002:0x07 [Enforce pairing pin] to value 1.
Warning
Do not disable the PIN on the Server device for security reasons. If disabled, any BT Client will be able to connect! Disabling the PIN might be acceptable only when other measures ensure that no unauthorized personnel or device can come within connection-distance from the Server device. For example, when the Server device is located in an area with physical restrictions.
CAN-CAN Wi-Fi CANlink® mobile 3600 CANlink® wireless 4000 Bridge¶
A CAN-CAN bridge can be configured between a CANlink® mobile 3600 and CANlink® wireless 4000 over either a Wi-Fi or Bluetooth connection.
The Wi-Fi connection is recommended, and is documented here.
In this example, we configure the CANlink® mobile 3600 as:
-
Wi-Fi Access Point (AP)
-
Server
- Channel 36, 5GHz band
- WPA2 enabled
- Password:
ChocolateOnly4Breakfast! - CAN Node ID:
39 - IP Address and Port
192.168.0.39:30000
And the CANlink® wireless 4000 as:
-
Wi-Fi Client
-
CAN Node ID:
44
Server (CANlink® mobile 3600)¶
All objects in the following table are mandatory to set for the wireless module to function as a Wi-Fi Access Point.
| Object | Object Name | Value | Notes |
|---|---|---|---|
0x3008:0x03 |
Bluetooth Enable | 0 |
Disabled |
0x3008:0x09 |
BLE Enable | 0 |
Disabled |
0x3008:0x02 |
WiFi Enable | 1 |
Enabled |
0x3000:0x0F |
WLAN - Access Point Channel | 36 |
Channel 36 in 5GHz band |
0x3000:0x01 |
WLAN - Operating Mode | 2 |
Mini Access Point |
0x3000:0x09 |
WLAN - DHCP Mode | 2 |
DHCP Server |
0x3000:0x02 |
WLAN - SSID | CLM3600 |
Name of Network SSID |
0x3000:0x04 |
WLAN - Authentication Type | 7 |
WPA2 |
0x3000:0x05 |
WLAN - Authentication Key | ChocolateOnly4Breakfast! |
Network Key |
0x3003:0x01 |
WLAN - Socket Server Enable | 1 |
Enabled |
0x3000:0x0A |
WLAN - Static IP Address | 192.168.0.39 |
Address of Server |
0x3000:0x0B |
WLAN - Static Network Mask | 255.255.255.0 |
Network Mask |
0x3000:0x0C |
WLAN - Static Gateway Address | 192.168.0.1 |
Gateway Address |
0x3000:0x0D |
WLAN - Static Primary DNS Server | 192.168.0.1 |
Address of Server |
0x3000:0x0D |
WLAN - Static Secondary DNS Server | 192.168.0.1 |
Address of Server |
0x3003:0x02 |
WLAN - Socket Listen Port Number | 30000 |
Port Number |
0x3003:0x03 |
WLAN - Socket Listen Protocol | 0 |
TCP |
- Add other settings such as
0x4050:0x03 [CAN 1: Device CANopen Node ID]according to requirements. (In this example,39). - Reboot device
Client (CANlink® wireless 4000)¶
| Object | Object Name | Value | Notes |
|---|---|---|---|
0x3008:0x03 |
Bluetooth Enable | 0 |
Disabled |
0x3008:0x09 |
BLE Enable | 0 |
Disabled |
0x3008:0x02 |
WiFi Enable | 1 |
Enabled |
0x3000:0x01 |
WiFi Operating Mode | 1 |
Infrastructure |
0x3000:0x09 |
WiFi DHCP Mode | 1 |
DHCP Client |
0x3000:0x04 |
WLAN Authentication Type | 7 |
WPA/WPA2 Mixed |
0x3000:0x02 |
WLAN SSID | CLM3600 |
Name of Network SSID |
0x3000:0x05 |
WLAN - Authentication Key | ChocolateOnly4Breakfast! |
Network Key |
0x3010:0x17 |
URL Address/WiFi Client only 1 | 192.168.0.39 |
Server IP Address |
0x3003:0x02 |
Socket Listen Port/WiFi only 1 | 30000 |
Server Port Number |
0x3000:0x10 |
Enable 2.4GHz WiFi Band / Infrastructure only | 0 |
Disabled |
0x3000:0x11 |
Enable 5GHz WiFi Band / Infrastructure only | 1 |
Enabled |
0x3010:0x15 |
EEP Connection Direction Configuration/Server or Client 1 | 3 |
Client Enabled |
0x3010:0x16 |
EEP Connect Type 1 | 1 |
TCP Socket |
- Add other settings such as
0x4050:0x03 [CAN 1: Device CANopen Node ID]according to requirements. (In this example,44). - Reboot device
CAN-Bluetooth/Wi-Fi®/BLE Interface¶
The device is designed for wireless operation via Bluetooth, Wi-Fi® or BLE interface.
| Function | 3610 | 3611 | 3613 | 3617 | 3633 | 3637 | 3651 | 3653 | 3657 | 3673 | 3677 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| CAN-CAN Bluetooth/Wi-Fi®/BLE bridge | ❌ | ❌ | ❌ | ❌ | ✅ | ✅ | ❌ | ❌ | ❌ | ✅ | ✅ |
| CAN-Bluetooth/Wi-Fi®/BLE interface | ❌ | ❌ | ❌ | ❌ | ✅ | ✅ | ❌ | ❌ | ❌ | ✅ | ✅ |
| CAN-BLE Peripheral | ❌ | ❌ | ❌ | ❌ | ✅ | ✅ | ❌ | ❌ | ❌ | ✅ | ✅ |
CAN-Bluetooth Interface¶
In operation as a CAN-Bluetooth interface, CAN data is transmitted wirelessly and bidirectionally to other Bluetooth-capable devices supported by the Proemion Byte Command Protocol, e.g. CANlink wireless, CANlink Bluetooth, PCs, smartphones or tablet PCs. For further information refer to the Byte Command Manual.
The device supports Bluetooth Classic (2.1 + EDR).
The device operates only as a Bluetooth Client.
Bluetooth PIN-based paring for security is enabled by setting 0x3002:0x07 [Enforce pairing pin] to value 1.
Warning
Do not disable the PIN on the Server device for security reasons. If disabled, any BT Client will be able to connect! Disabling the PIN might be acceptable only when other measures ensure that no unauthorized personnel or device can come within connection-distance from the Server device. For example, when the Server device is located in an area with physical restrictions.
CAN-BLE Interface¶
The CAN-BLE interface enables bidirectional wireless data exchange between a CAN network and BLE-capable devices that support the Proemion Byte Command Protocol, such as CANlink wireless devices, PCs, and mobile devices.
For configuration and usage details, see the BLE chapter.
CAN-Wi-Fi® Interface¶
In operation via the CAN-Wi-Fi® interface, CAN data is transmitted wirelessly and bidirectionally to other Wi-Fi®-capable devices supported by the Proemion Byte Command Protocol, e.g. CANlink wireless, PCs, smartphones or tablet PCs.
The CAN-Wi-Fi® interface features two operating modes: infrastructure mode and mini access point mode.
In infrastructure mode, the device is integrated into an existing network infrastructure and data transmission takes place via one or more access points within this network.
In mini access point mode, the CANlink® mobile 3600 additionally provides a Wi-Fi® access point function, allowing other Wi-Fi®-capable devices to connect directly to the device.
In this mode, the device can automatically provide the required network parameters via an integrated DHCP server.
Wi-Fi® Security¶
| Name | Authentication | Data Protection |
|---|---|---|
| None (OSA)1 | No | Data is not encrypted |
| WPA2 | Yes (shared password) | Data is encrypted |
| PEAP2 | Yes (username & password) | Data is encrypted |
| EAP-TLS2 | Yes (client & server certificates) | Data is encrypted |
Wi-Fi® Frequencies and Channels¶
The device's Wi-Fi® interface features automatic domain recognition and supports the following regulatory domains: WORLD, ETSI, FCC. If neither ETSI nor FCC are recognized, the radio module uses WORLD as a standard.
| Name | Band | TX Channel |
|---|---|---|
| World | 2.4 Ghz | 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 |
| U-NII-1 | 36, 40, 44, 48 | |
| U-NII-2 | 52, 56, 60, 64 | |
| U-NII-2e | 100, 104, 108, 112, 116, 132, 136, 140 | |
| U-NII-3 | - | |
| ETSI | 2.4 GHz | 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13 |
| U-NII-1 | 36, 40, 44, 48 | |
| U-NII-2 | 52, 56, 60, 64 | |
| U-NII-2e | 100, 104, 108, 112, 116, 120, 124, 128, 132, 136, 140 | |
| U-NII-3 | 149, 153, 157, 161, 165 | |
| FCC | 2.4 GHz | 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11 |
| U-NII-1 | 36, 40, 44, 48 | |
| U-NII-2 | 52, 56, 60, 64 | |
| U-NII-2e | 100, 104, 108, 112, 116, 132, 136, 140 | |
| U-NII-3 | 149, 153, 157, 161, 165 |
Note
When the Wi-Fi® is using a channel that is not available in the recognized domain, it is possible that the communication may not work.
-
Using Open System Authentication when device is configured as an Access Point is not supported in firmware version >= 4.0.0. ↩
-
Note regarding Wi-Fi® encryption/authentication: If CANlink mobile devices are used in the Wi-Fi® environment of 802.1x or WPA-Enterprise or WPA2/802.1x, a separate project agreement is required. For more information, contact Service and Support. ↩↩
Sensors
Acceleration Sensor¶
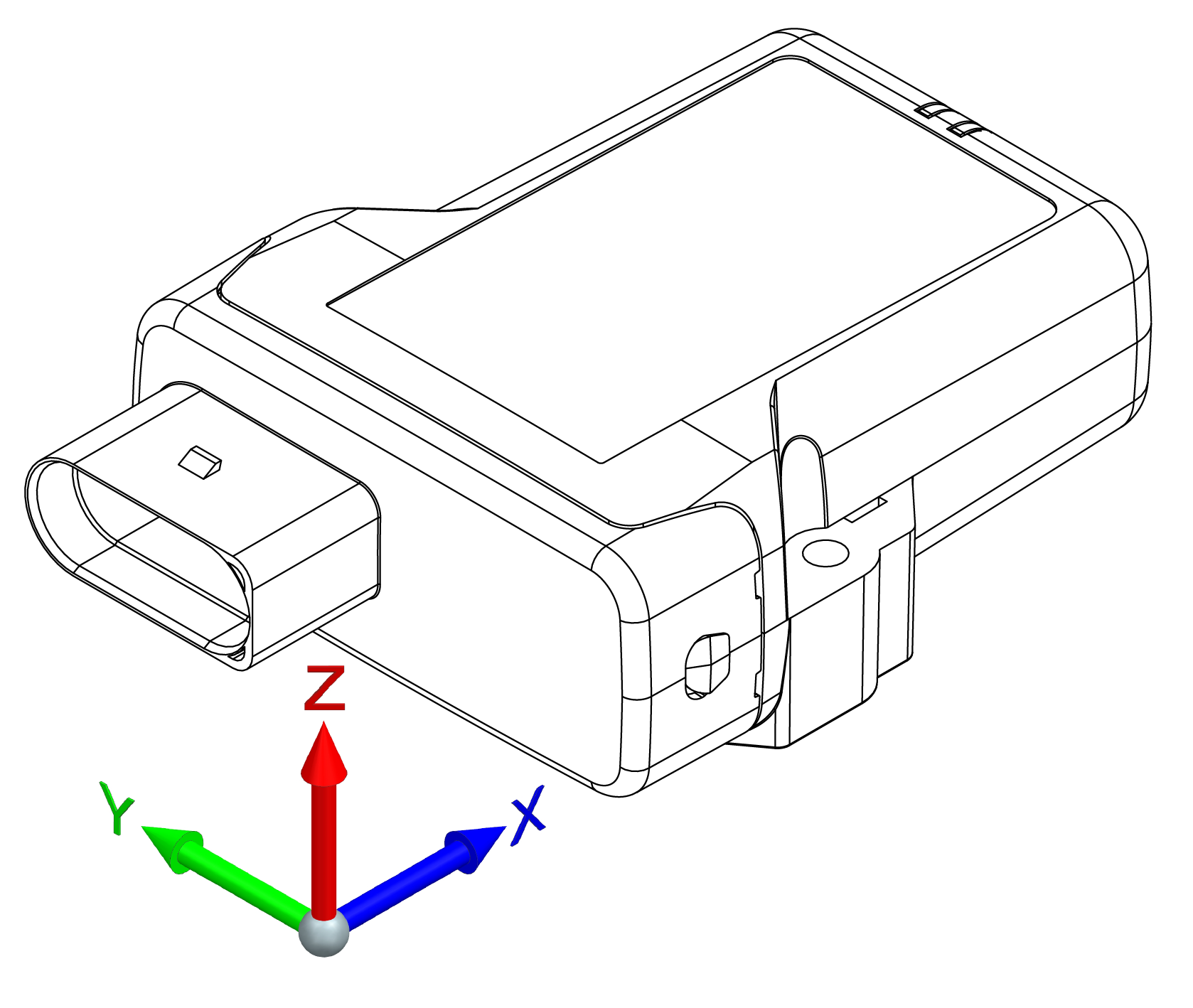
The acceleration sensor registers and evaluates accelerations in the directions of the X, Y, and Z axes, and sends them via the CAN bus.
Note
The sensor is not calibrated.
Gyro Sensor¶
The 3-axis gyro sensor registers and evaluates the angle speeds in the X, Y, and Z axes and sends them to the CAN bus.
Note
The sensor is not calibrated.
Hardware
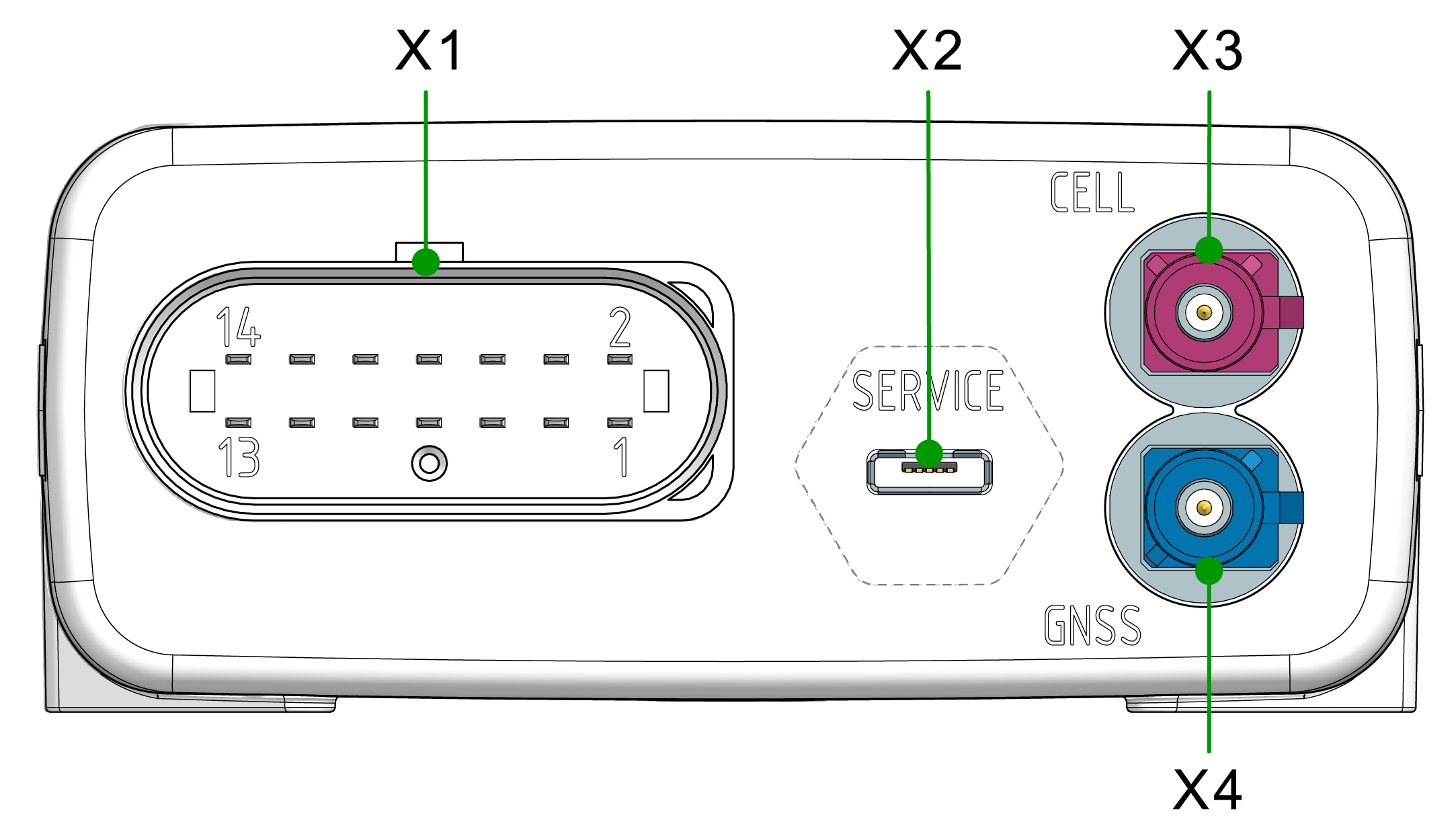
Connectors¶
The device is equipped with the following connectors:
- X1 - main plug connector
- X2 - service interface/micro-USB port, type AB
- X3 - cellular antenna connector
- X4 - GNSS antenna connector
Note
Mating Cycles:
According to the manufacturer's information, the connectors are equipped for the following minimum number of mating cycles:
- Main plug connector: 10 cycles
- Fakra plug: 100 cycles
- Cellular Antenna Port: 100 cycles
- Service interface/Micro USB: 1000 cycles
If the minimum number of mating cycles is exceeded, individual parameters could lie outside those in the specification; meaning, the mating cycles can be carried out without quality problems at least for the minimum numbers of mating cycles. The basic function of the connectors remains intact.
Please be aware that the process of the CANlink mobile system integration is not designed for a high number of mating cycles.
Ideally - to minimize the mating cycles - the configuration should be finalized at the desk with the Starter Cable and not on the machine to avoid the device being plugged in repeatedly for each configuration update.
Optional CAN Interfaces:
The pin assignment shown in the following can vary depending on the type. The types 3611 and 3651 have no CAN2 and CAN3 interface.
Input specifications:
The analog inputs operate in a range of 0 VDC to 15 VDC.
Optionally, you can use the input as a digital input with a maximum voltage of 36 VDC. The digital output switches to supply voltage on terminal 30 and can only take a maximum load of 500 mA. Provide an external safeguard if this limit is not ensured by the external terminal 30 power supply.
Input terminal 15 detects "high" from a voltage of 5.5 V and "low" below a voltage of 2.3 V.
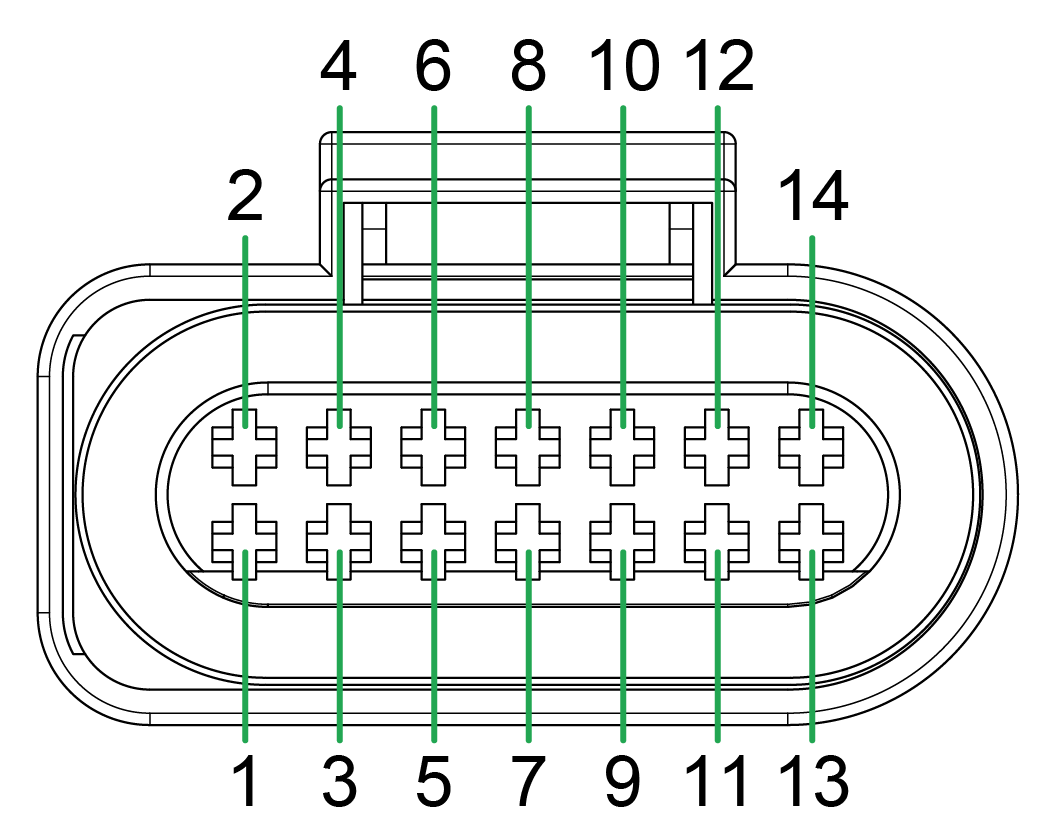
X1 - Main Plug Connector¶
Use the main plug connector to connect the device to the CAN bus and supply it with power. The I/O signals are integrated in the plug connector.
The main plug connector contains a reset button, see screenshot below.
The Reset button is required to complete local firmware updates or to switch the device off in the case of types with an integrated, rechargeable battery.
Pin assignment¶
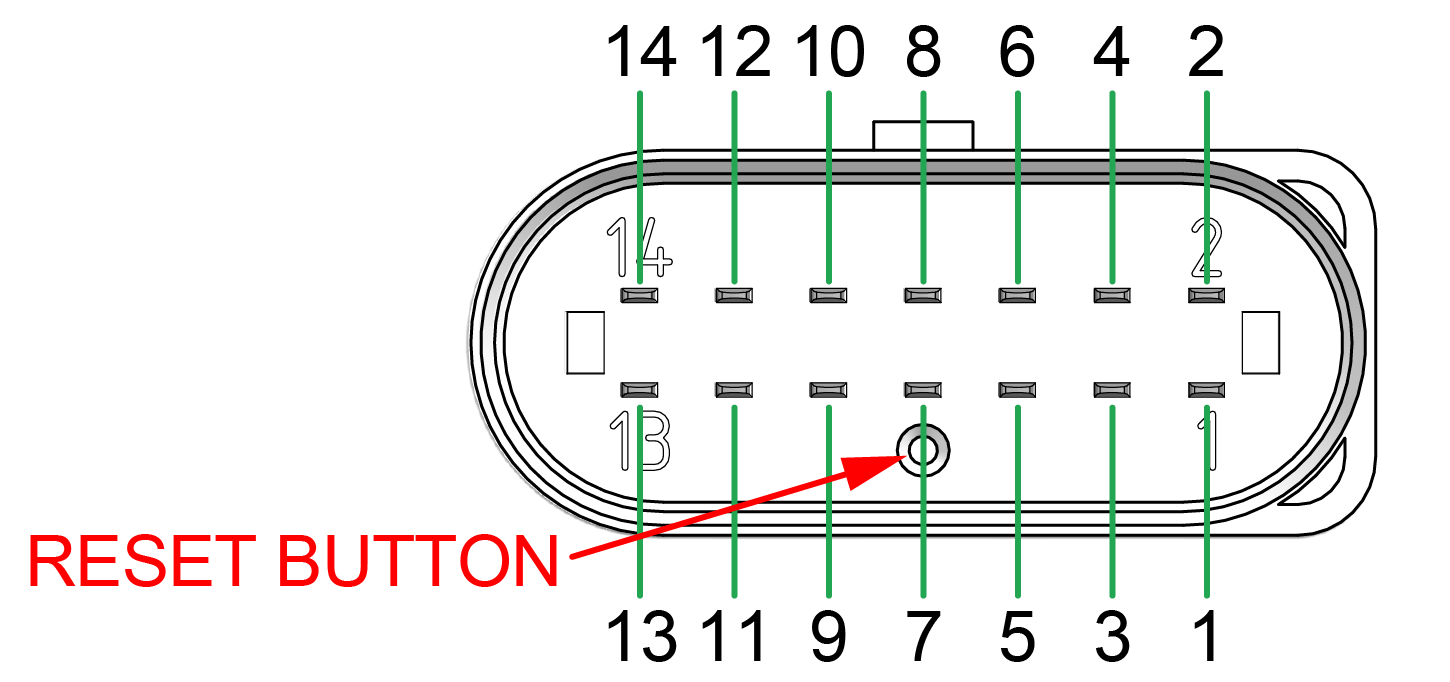
| Pin | Designation | Description |
|---|---|---|
| 1 | Terminal 30 / VCC | Power supply |
| 2 | CAN3-Low | CAN, bidirectional |
| 3 | Terminal 31 / ground | Power supply |
| 4 | Analog input 1 | I/O input |
| 5 | Analog input 2 | I/O input |
| 6 | Analog input 3 | I/O input |
| 7 | Digital output | I/O output |
| 8 | Terminal 15 | Input (ignition_signal) |
| 9 | CAN3-High | CAN, bidirectional |
| 10 | CAN2-GND | - |
| 11 | CAN2-High | CAN, bidirectional |
| 12 | CAN2-Low | CAN, bidirectional |
| 13 | CAN1-High | CAN, bidirectional |
| 14 | CAN1-Low | CAN, bidirectional |
Connect main plug connector¶
Carefully connect the cable with the main plug connector. When connecting the plug, there must be a clear audible click. Then the lock is correctly engaged.
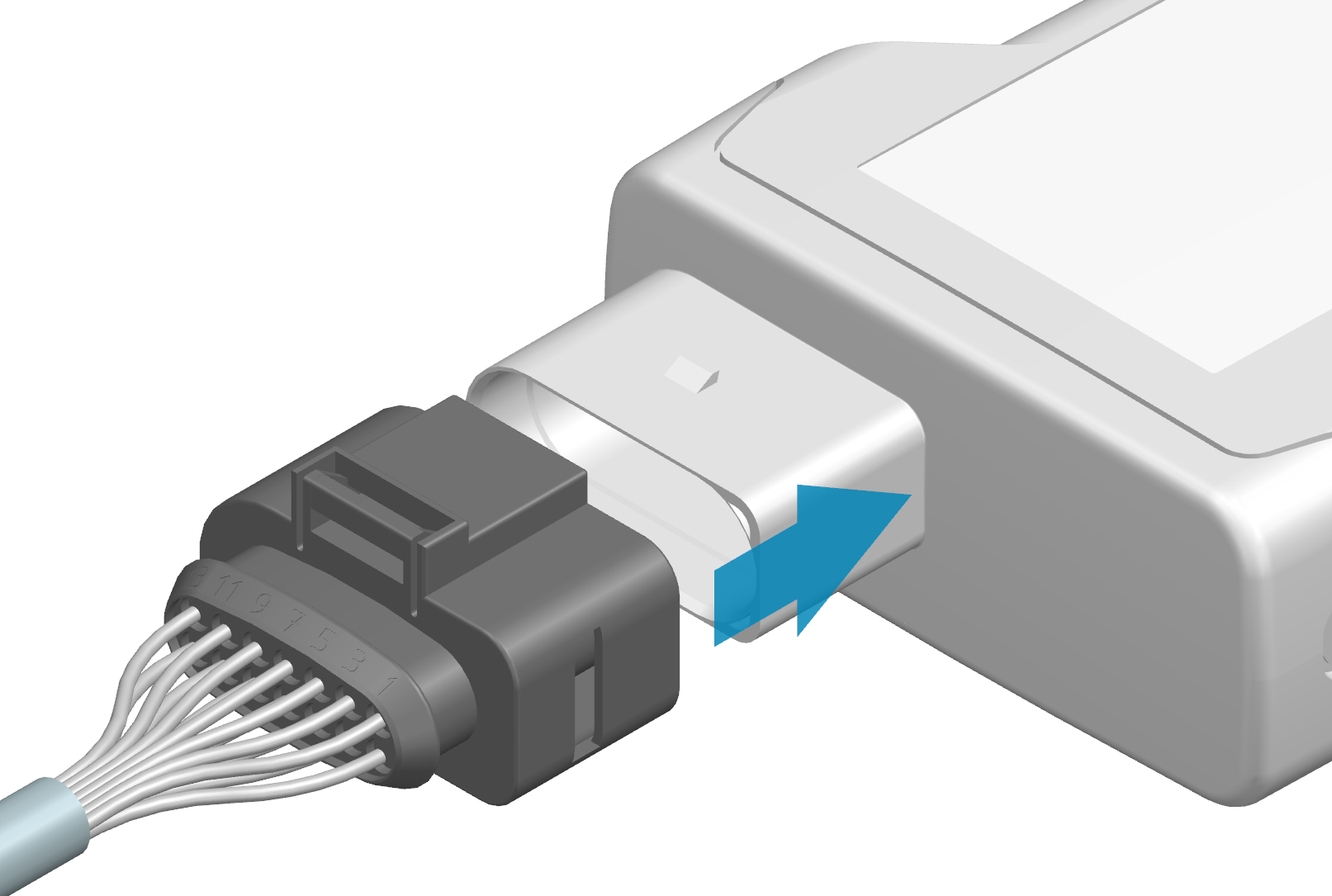
-
Preparation:
Ensure that all terminal contacts and pins on both sides of the plug connection are aligned correctly and are in a straight position. -
Mating process:
Insert the cable until you feel the locking mechanism engage.
A force of up to 140 N may be required. -
In case of resistance:
If an unusually high resistance occurs right at the start, interrupt the process and check the plug connection for:-
bent pins
-
blocked or misaligned contacts
-
Warning
Do not use any tools to force the connection. Damage to the contact carrier or the pins can impair the function.
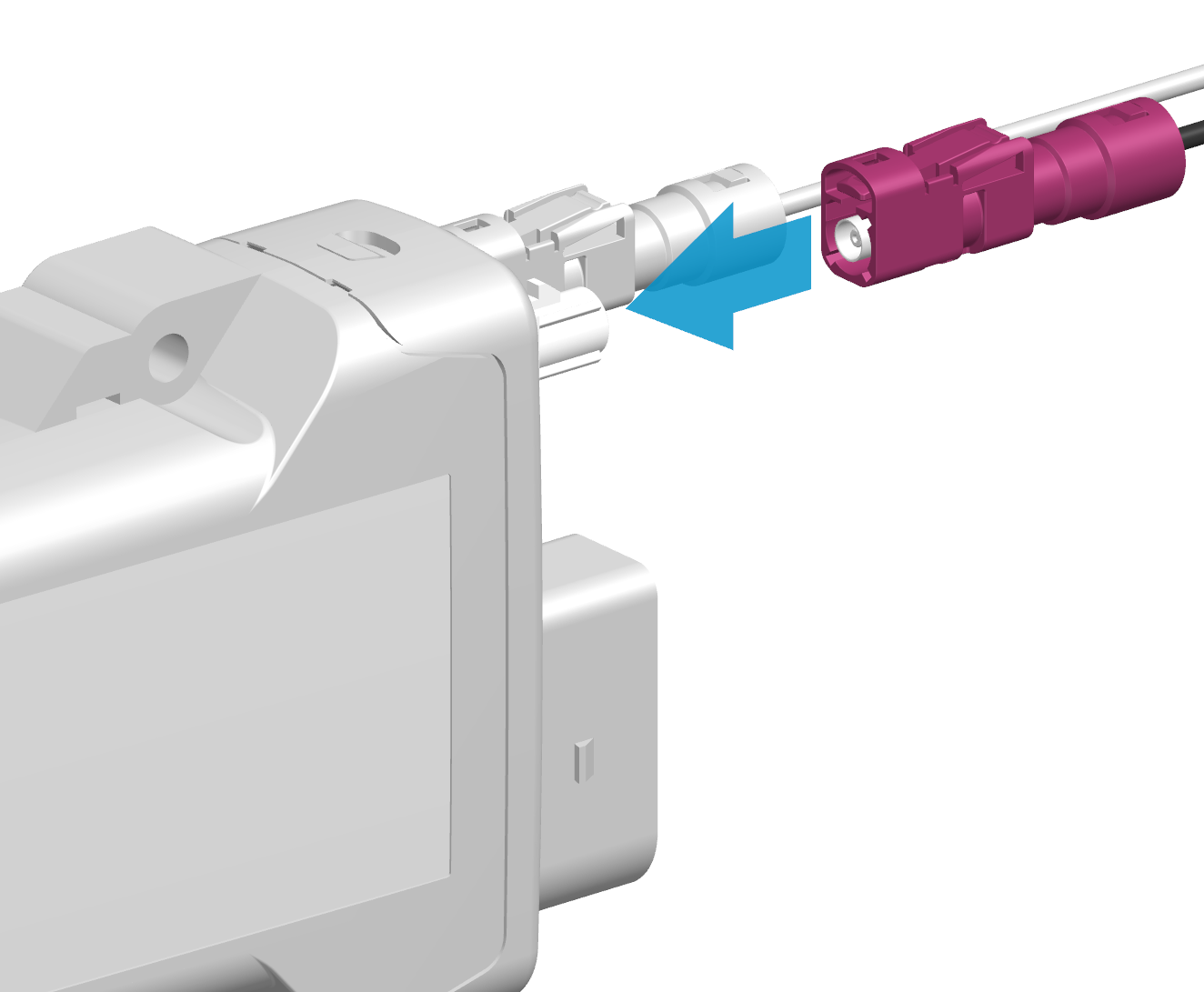
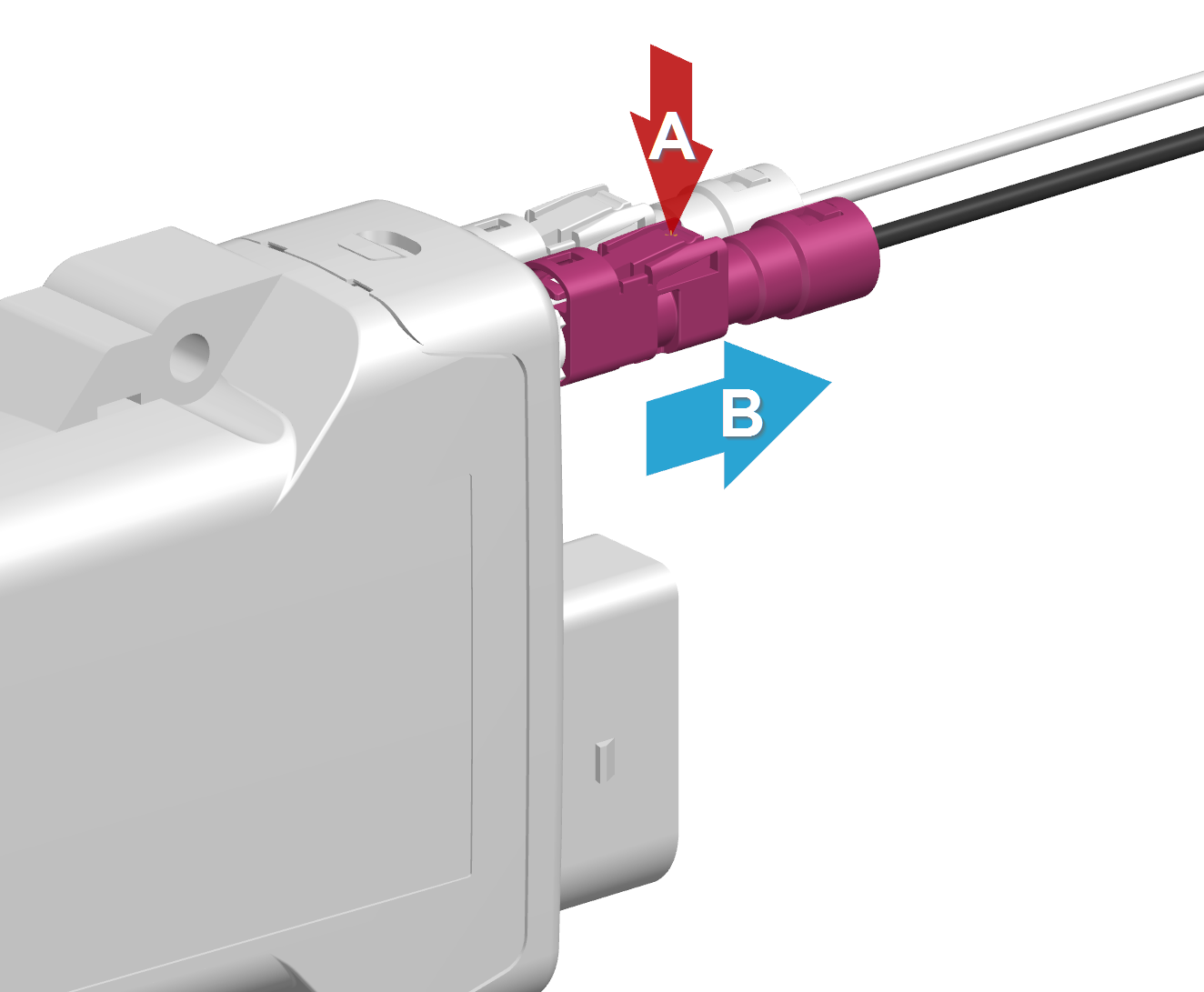
Disconnect main plug connector¶
To disconnect the main plug connector, remove it as shown in the following image:
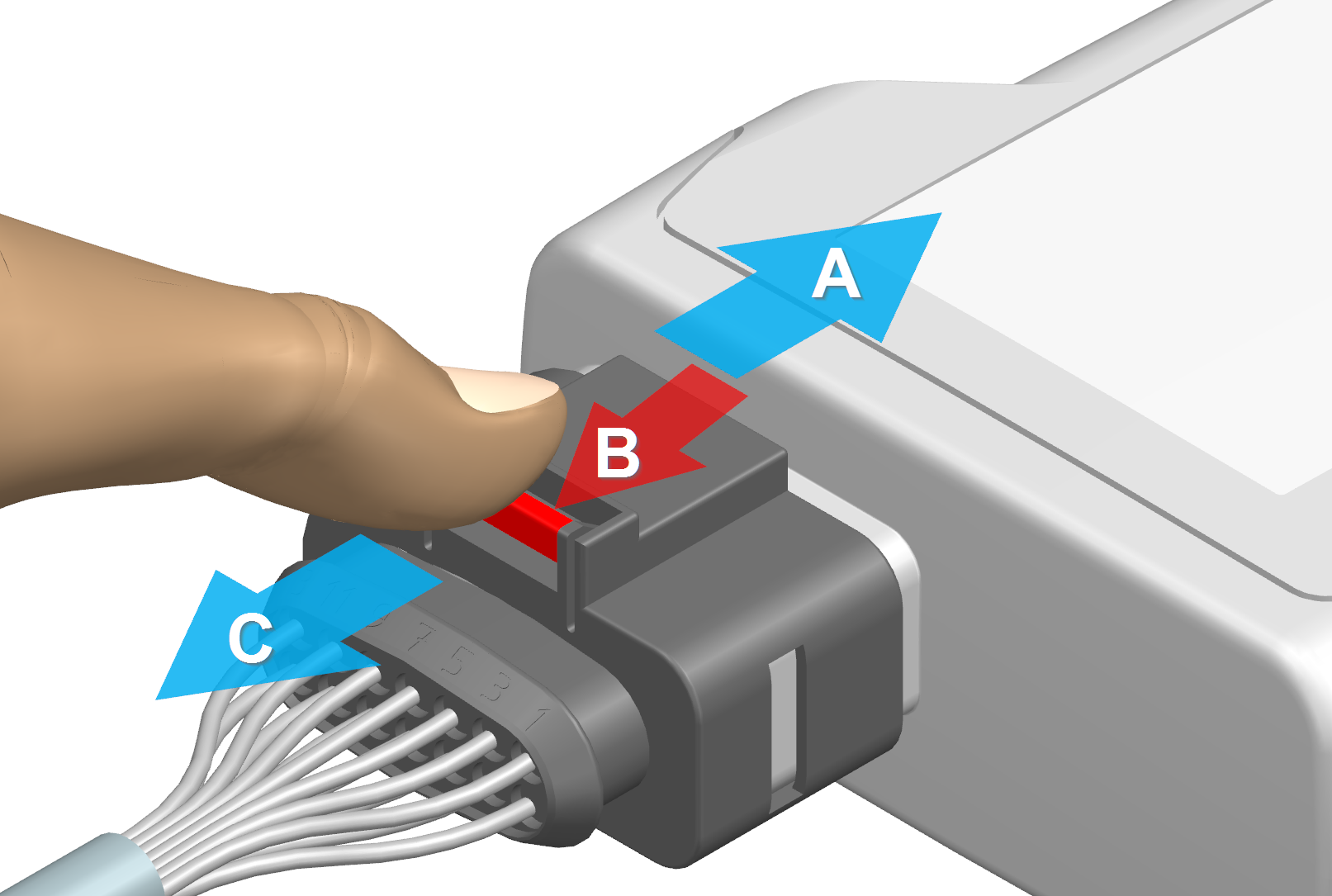
-
(A) Preparation: Push in the plug so that the latch is released.
-
(B) Hold the release mechanism: Pull and hold the release mechanism marked in red in the direction of the arrow to release the latch.
-
(C) Remove the plug: Pull out the plug completely with a maximum force of 90 N.
Depending on the installation situation, tools may be required for unlocking.
Please observe the directions and be aware of the risk of injury when using tools.
Warning
Make sure that no foreign objects or damaged parts block the unlocking mechanism. A clean and free plug connection is a prerequisite for safe disconnection.
X2 - Service Interface¶
Note
The firmware update via the Service Interface is no longer supported on devices running firmware version v4.0.0 or later. The deactivation is required to meet cybersecurity requirements in compliance with the RED directive. Devices shipped with firmware v4.0.0 and above no longer support this functionality.
The Service Interface is a micro-USB port. Use the micro-USB port to connect the device to a PC.
The micro-USB port is used for diagnoses as well as for bootloader and firmware updates:
- For instructions on how to perform diagnoses, see Diagnosis via micro-USB port.
To perform debugging or diagnosis, you need the cable USB cable, USB-A on micro-USB-B, 1.6 m (part number 136000138). See Software and Accessories.
Pin assignment¶
See the following overview for the pin assignment:
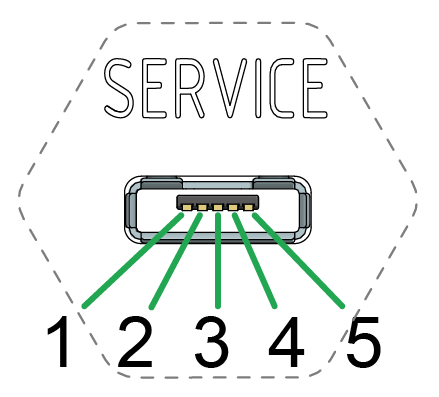
| Pin | Designation | Description |
|---|---|---|
| 1 | VBUS | Input |
| 2 | D- | Bidirectional |
| 3 | D+ | Bidirectional |
| 4 | ID | Input (0=boot_mode, 1/open=USB_device) |
| 5 | Ground | USB power supply / reference ground |
Risk of property damage
Pay attention that the USB plug is connected according to the correct assignment and without the need for any excessive force. Improper connection or excessive force can damage the USB port and render the device seal ineffective.
Note
Protection class IP6K7 is also ensured when no USB cable is connected.
Note
To protect the micro-USB port from soiling, make sure that the special Service Sticker is covering the USB port.
The device is self-powered. The micro-USB port corresponds with the USB 2.0 full speed device mode. The device is not supplied with power via the VBUS. Use of the ID pin does not comply with the USB standard because the micro USB port does not support USB-OTG. If a type-A USB cable is connected, the device remains in Bootloader mode.
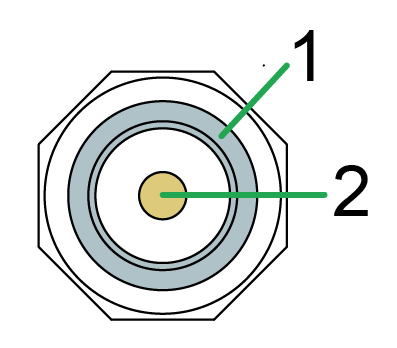
X3 - Cellular Antenna Connector¶
Use the cellular antenna connector (mobile radio connector) for types 3651, 3673, 3677 with external antennas (refer to the CANlink mobile 3600 Datasheet) to connect the device with an antenna to receive cellular signals.
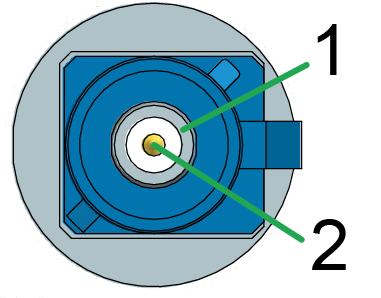
Pin assignment¶
See the following overview for the pin assignment:
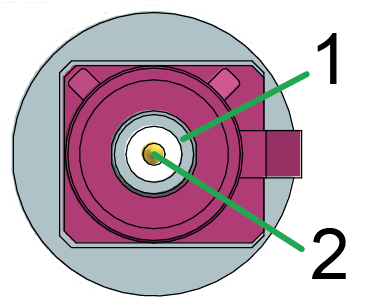
| Pin | Designation | Description |
|---|---|---|
| 1 | Ground | Signal ground /shielding |
| 2 | Signal | Cellular |
The connector is short-circuit-proof against Ground and detects the connection of an antenna in case that it has an integrated diagnosis resistance (10 kOhm).
Health hazards of radio-frequency energy
Risk of minor injury.
- Make sure the device is switched off during installation.
Note
The correct description for the corresponding mating connector is:
- FAKRA, D-coded, Claret Violet, Jack (Female)
- Manufacturer: Amphenol
- Part number: 3FA1-NDSJ-C01E0
Connect antenna cable¶
Carefully connect the antenna cable with the coded antenna connector.
-
Preparation:
Ensure that the coding within the socket is matching the coding of the connector and that all terminal contacts and pins on both sides of the plug connection are properly aligned and and are in a straight position. -
Insertion process:
Insert the connector until you feel the locking mechanism engage.
There must be a clear audible click. Then the lock is correctly engaged.
A force of up to 45 N may be required.
Disconnect antenna cable¶
-
(A) Hold the release mechanism:
Press and hold the release mechanism with your finger in the direction of the arrow to release the locking tab. -
(B) Pulling out the plug:
Pull out the plug completely with a maximum force of 30 N.
X4 - GNSS Antenna Connector¶
The GNSS antenna connector for types 3651, 3673, 3677 with external antennas (refer to the CANlink mobile 3600 Datasheet) is used to connect the device with an active antenna to receive signals from GNSS satellites.
Pin assignment¶
See the following overview for the pin assignment:
| Pin | Designation | Description |
|---|---|---|
| 1 | Ground | Signal ground /shielding |
| 2 | Signal | GNSS signal / supply voltage 3.3 V |
The GNSS antenna connector is supplied with a voltage of approx. 3.3 V and can supply active antennas with a maximum of 40 mA of power. The port is short-circuit-proof against Ground and detects an antenna is present from a current drawn greater than approx. 2 mA.
For connecting and disconnecting the antenna, please refer to Connect antenna cable and Disconnect antenna cable.
Health hazards of radio-frequency energy
Risk of minor injury.
- Make sure the device is switched off during installation.
Note
The correct description for the corresponding mating connector is:
- FAKRA, C-coded, Signal Blue, Jack (Female)
- Manufacturer: Amphenol
- Part number: 3FA1-NCSJ-C01E0
Cables
Cables¶
The device supports different cable types for specific use cases:
- Starter Cable – used for power supply and CAN communication
- Diagnostics Cable – used for device diagnostics and debugging via USB
- Adapter Cables – used to integrate the device into existing systems or to adapt legacy connections
Detailed information for each cable type, including connector pinouts, is provided in the following sections.
Cable Installation¶
The following instructions apply to the installation and routing of cables for the device.
Proper cable installation is essential to ensure reliable operation and to prevent damage to connectors and the device.
- Assemble the cables in accordance with the recommendations of the cable or connector manufacturer.
- Ensure a sufficient bending radius of all cables during installation.
- Ensure appropriate strain relief for all cables.
- Fasten the cable harness near the main connector to prevent mechanical stress on the connector and housing.
- Protect and secure the cables within the machine to avoid damage caused by vibration or movement.
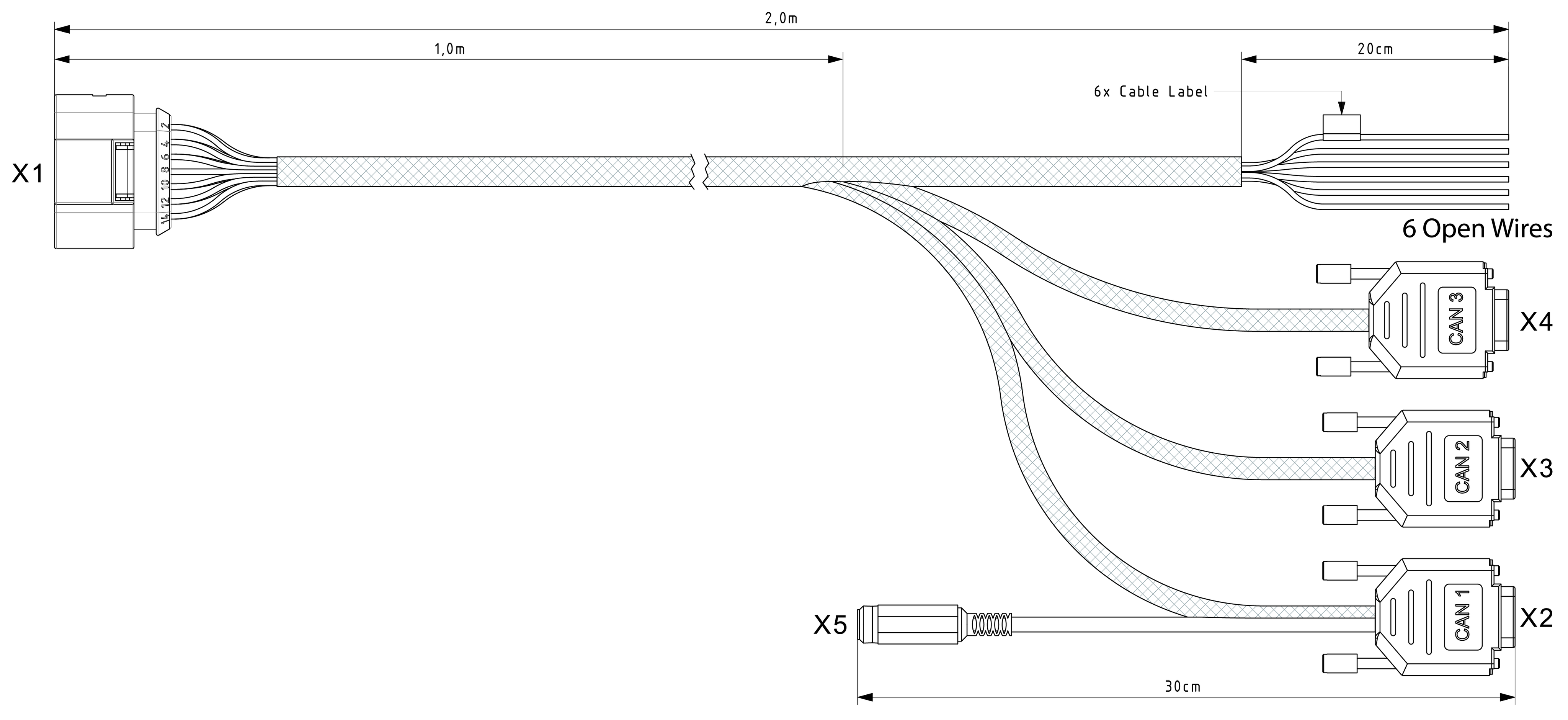
Starter Cable¶
The cable CLM3600 Starter Cable 6open 3dsub 1pw 2m (part number 136000202), which is also applicable for the CANlink® mobile 10000, must be used for the CANlink® mobile 3600 and CANlink® mobile 10000 variants and is equipped with the following connectors and open individual wires:
- X1: Main Plug Connector
- X2: CAN 1
- X3: CAN 2
- X4: CAN 3
- X5: Power Supply Connector
- 6 Open Wires
X1 - Main Plug Connector¶
| Pin | Designation | Color | Description |
|---|---|---|---|
| 1 | Terminal 30 / VCC | White | Power supply (steady plus vehicle battery) |
| 2 | CAN3-Low | Brown | CAN, bidirectional |
| 3 | Terminal 31 / ground | Green | Power supply |
| 4 | Analog input 1 | Yellow | I/O input |
| 5 | Analog input 2 | Gray | I/O input |
| 6 | Analog input 3 | Pink | I/O input |
| 7 | Digital output | Blue | I/O output |
| 8 | Terminal 15 | Red | Input (ignition signal) |
| 9 | CAN3-High | Black | CAN, bidirectional |
| 10 | CAN2-GND | Violet | - |
| 11 | CAN2-High | Gray-pink | CAN, bidirectional |
| 12 | CAN2-Low | Red-blue | CAN, bidirectional |
| 13 | CAN1-High | White-green | CAN, bidirectional |
| 14 | CAN1-Low | Brown-green | CAN, bidirectional |
6 Open Wires¶
Starter cable for main plug connector with 6 Open Wires
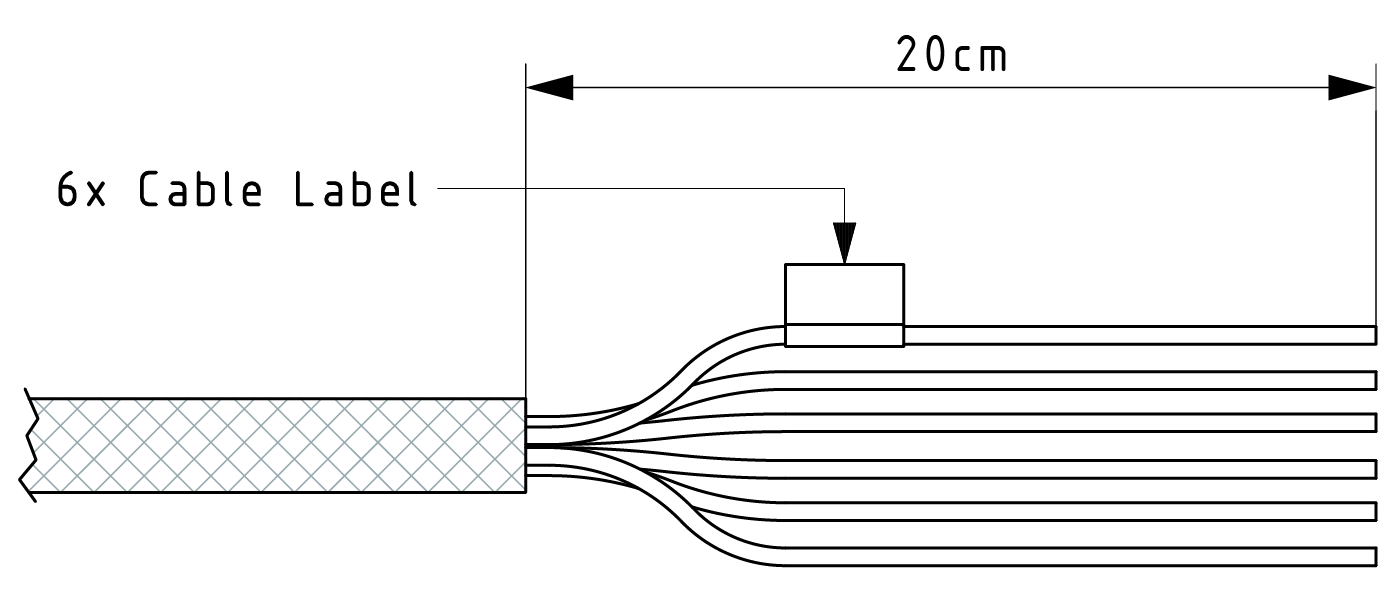
| Designation | Color | Description |
|---|---|---|
| Terminal 31 / ground | Green | Power supply |
| Analog input 1 | Yellow | I/O input |
| Analog input 2 | Gray | I/O input |
| Analog input 3 | Pink | I/O input |
| Digital output | Blue | I/O output |
| Terminal 15 | Red | Input (ignition signal) |
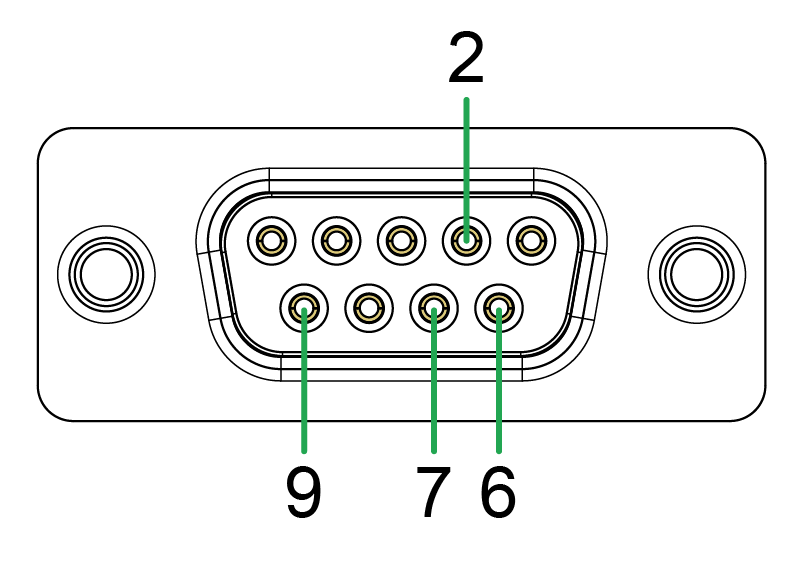
X2 - CAN 1¶
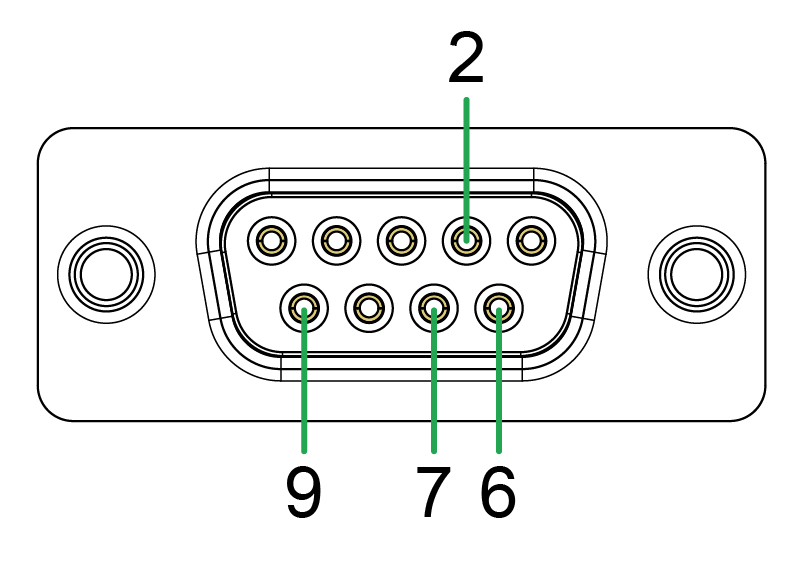
| Pin | Designation | Color | Description |
|---|---|---|---|
| 1 | Not connected | - | - |
| 2 | CAN1-Low | Brown-green | CAN, bidirectional |
| 3 | Not connected | - | - |
| 4 | Not connected | - | - |
| 5 | Not connected | - | - |
| 6 | Terminal 31 / ground | Green | - |
| 7 | CAN1-High | White-green | CAN, bidirectional |
| 8 | Not connected | - | - |
| 9 | Terminal 30 / VCC | White | Power supply |
X3 - CAN 2¶
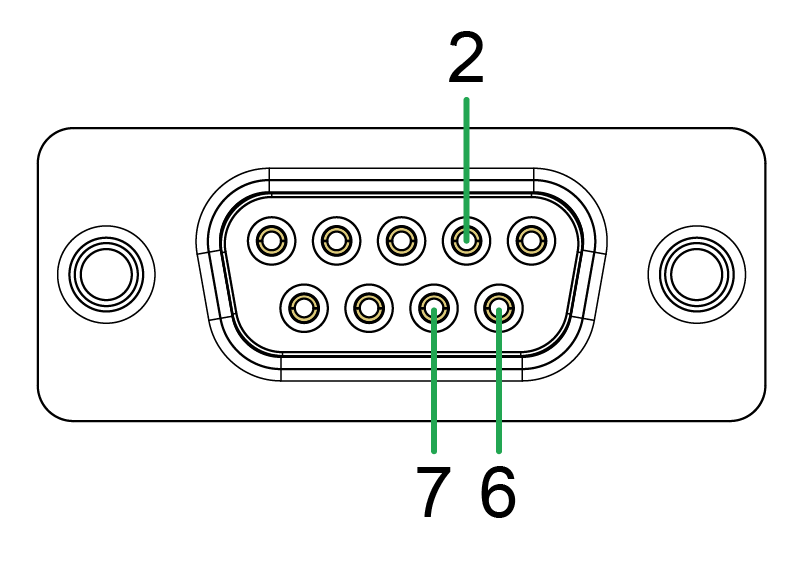
| Pin | Designation | Color | Description |
|---|---|---|---|
| 1 | Not connected | - | - |
| 2 | CAN2-Low | Red-blue | CAN, bidirectional |
| 3 | Not connected | - | - |
| 4 | Not connected | - | - |
| 5 | Not connected | - | - |
| 6 | CAN2-GND | Violet | - |
| 7 | CAN2-High | Gray-pink | CAN, bidirectional |
| 8 | Not connected | - | - |
| 9 | Not connected | - | - |
X4 - CAN 3¶
| Pin | Designation | Color | Description |
|---|---|---|---|
| 1 | Not connected | - | - |
| 2 | CAN3-Low | Brown | CAN, bidirectional |
| 3 | Not connected | - | - |
| 4 | Not connected | - | - |
| 5 | Not connected | - | - |
| 6 | CAN3-GND | Green | - |
| 7 | CAN3-High | Black | CAN, bidirectional |
| 8 | Not connected | - | - |
| 9 | Not connected | - | - |
X5 - Power Supply Connector¶
| Pin | Designation | Color | Description |
|---|---|---|---|
| 1 | Terminal 31 / ground | Green | Power supply |
| 2 | Terminal 30 / VCC | White | Power supply |
Diagnostics Cable¶
The USB cable, USB-A to Micro-USB-B, 1.6m (part number 136000138) is intended for debugging and for diagnosis of the device.
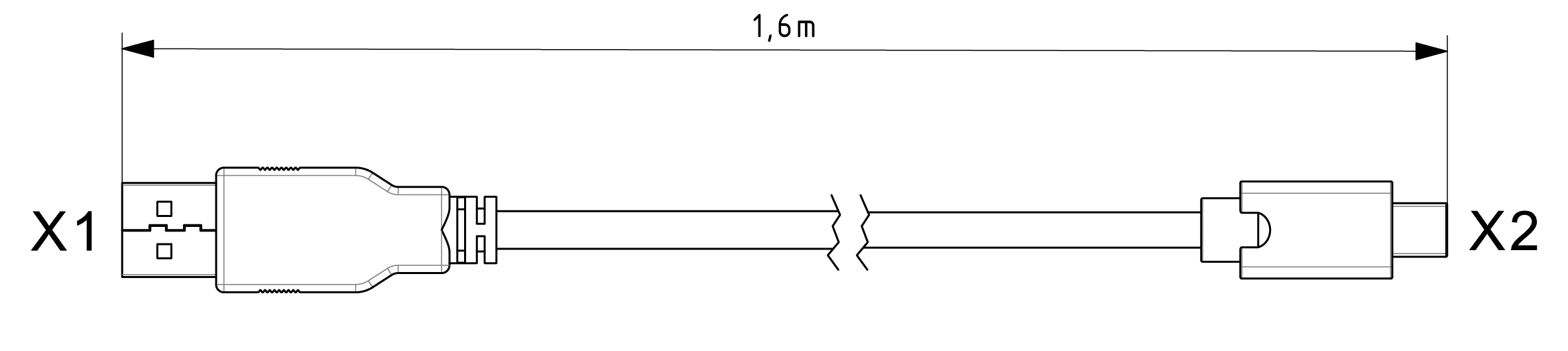
It has the following connectors:
- X1 - USB-A, male
- X2 - Micro-USB-B, male
X1 - USB-A, male¶
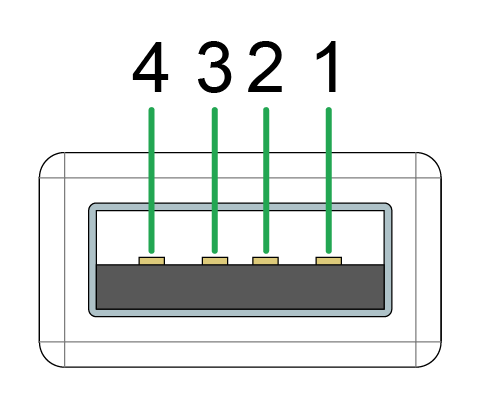
| Pin | Designation | Description |
|---|---|---|
| 1 | VBUS | +5V |
| 2 | D- | Data- (bidirectional) |
| 3 | D+ | Data+ (bidirectional) |
| 4 | GND | Ground |
X2 - Micro-USB-B, male¶
| Pin | Designation | Description |
|---|---|---|
| 1 | VBUS | +5V |
| 2 | D- | Data- (bidirectional) |
| 3 | D+ | Data+ (bidirectional) |
| 4 | not connected | |
| 5 | GND | Ground |
Adapter Cables¶
The following adapter cables are applied when replacing old devices.
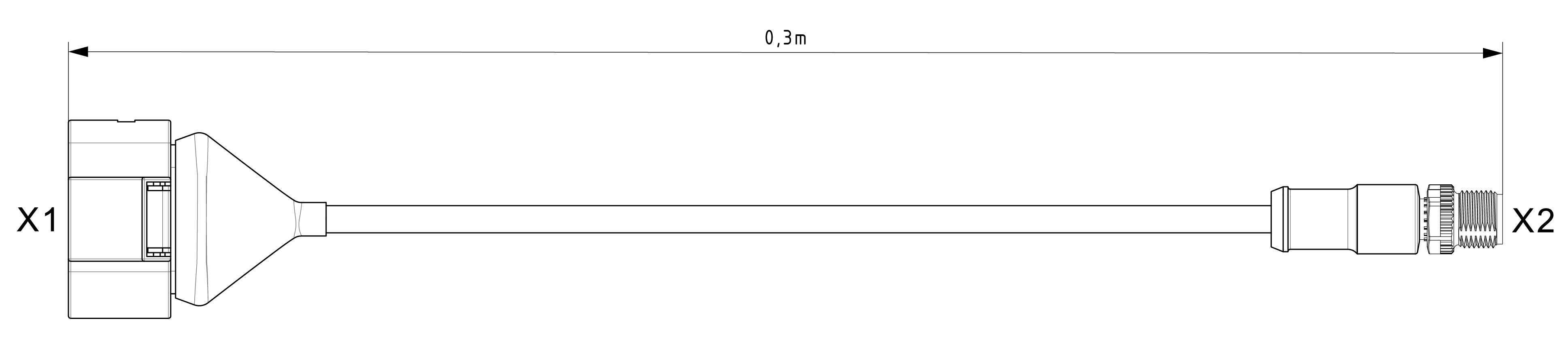
Adapter Cable to M12, 5-Pin¶
The Adapter Cable to M12, 5-Pin (part number 136200001).
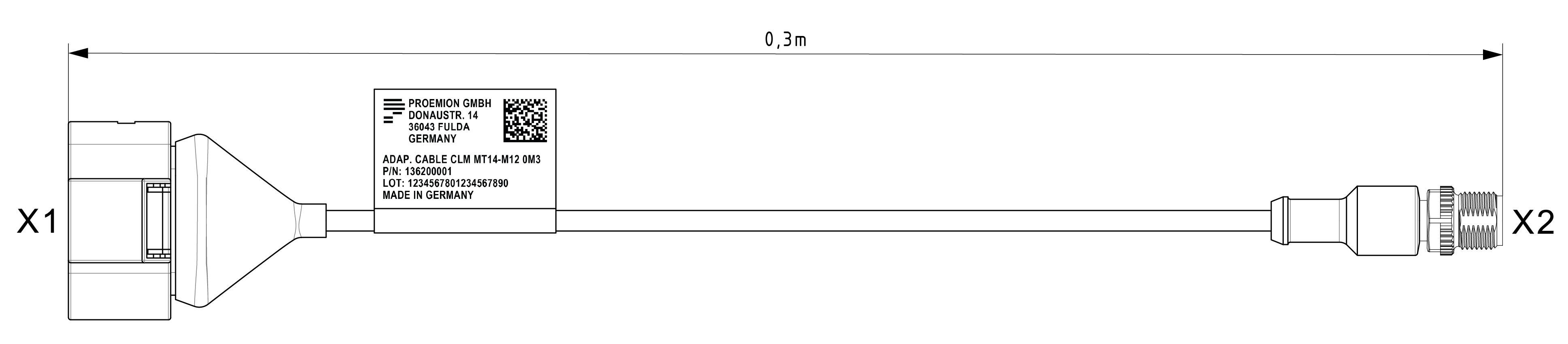
It has the following connectors:
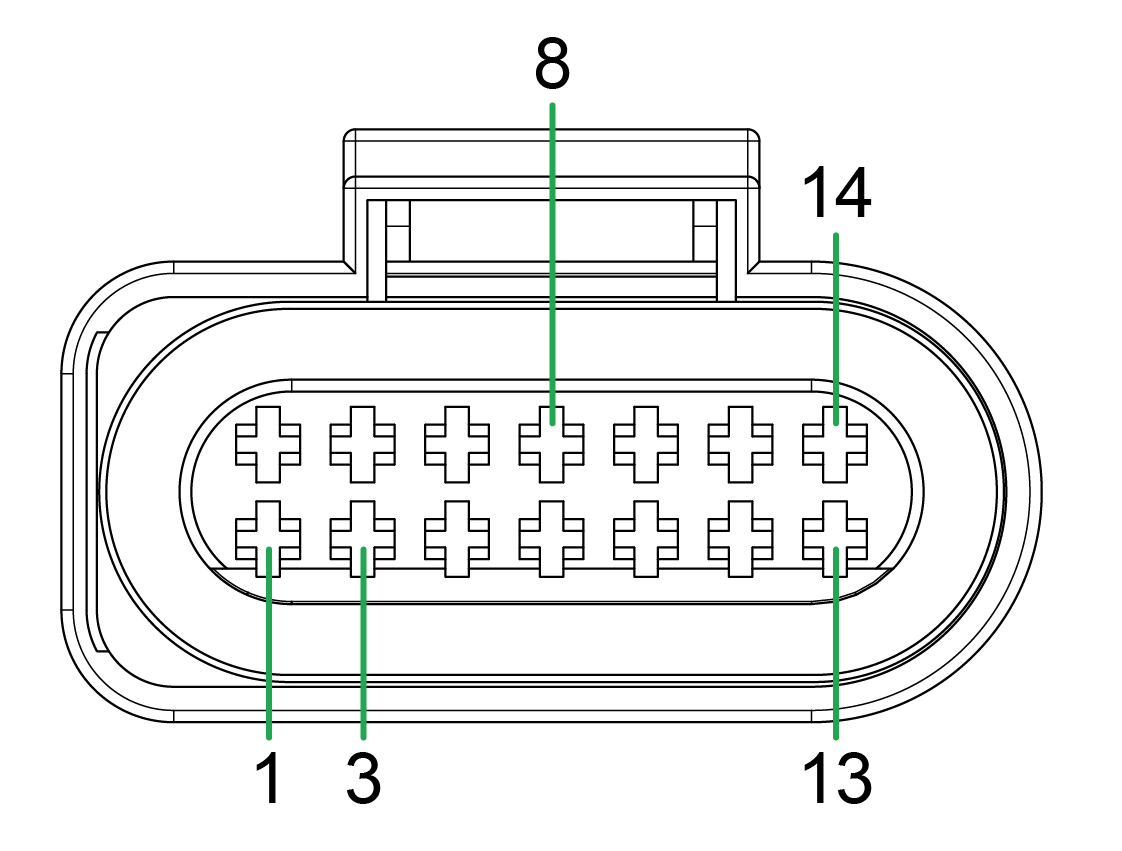
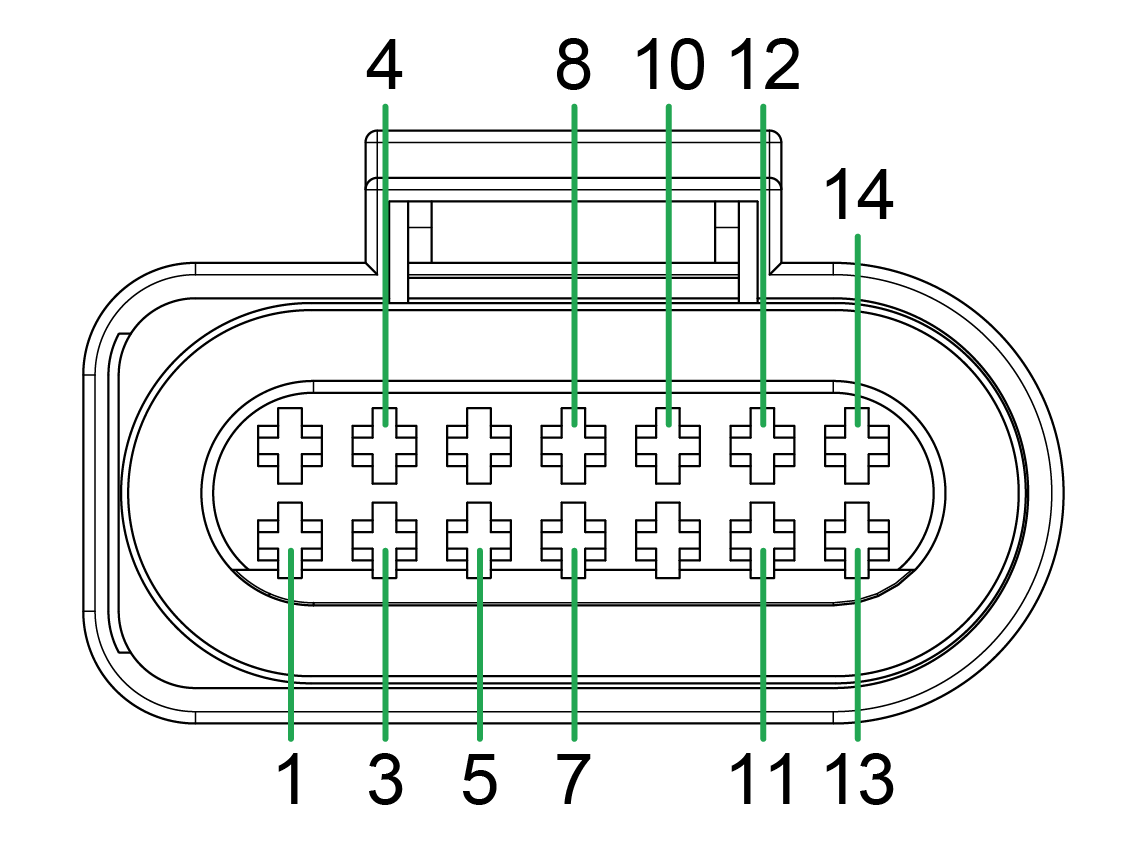
- X1 - Micro-Timer II socket connector, 14-pin, female, code I
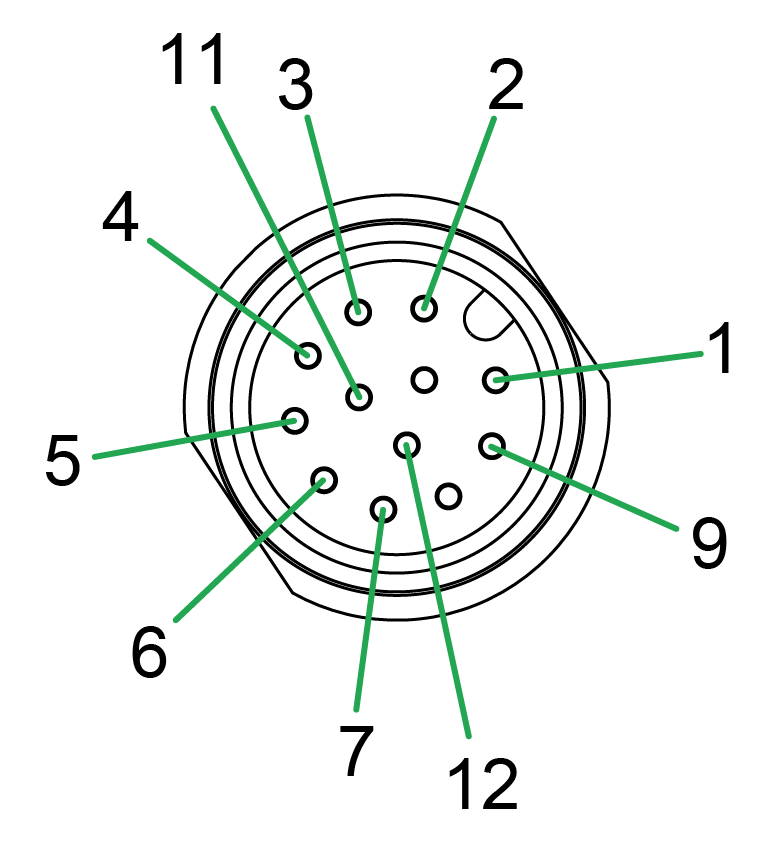
- X2 - M12 connector, 5-pin, male, code A
X1 - Micro-Timer II socket connector, 14-pin, female, code I¶
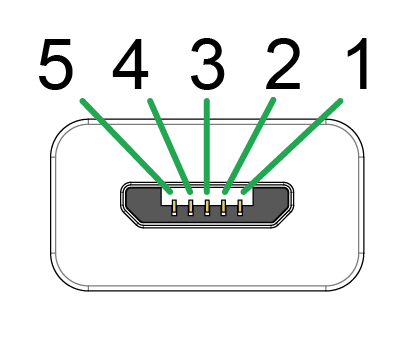
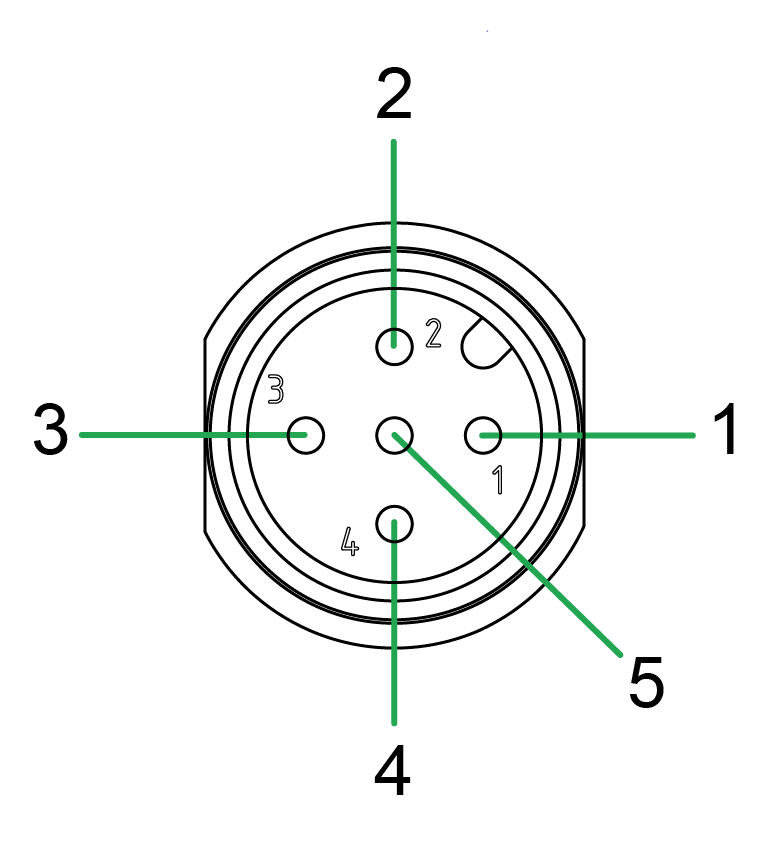
X2 - M12 connector, 5-pin, male, code A¶
Adapter Cable to M12, 12-Pin¶
The Adapter Cable to M12, 5-Pin (part number 136200002).
It has the following connectors:
- X1 - Micro-Timer II socket connector, 14-pin, female, code I
- X2 - M12 connector, 5-pin, male, code A
X1 - Micro-Timer II socket connector, 14-pin, female, code I¶
X2 - M12 connector, 5-pin, male, code A¶
Antenna Positioning¶
For optimal reception of Bluetooth, Wi-Fi®, and cellular signals, ensure that radio waves are not obstructed by housing parts or surrounding objects.
Ensure that radio signals are not obstructed by labels, objects, or surrounding structures.
- Only mount the device in the installation position shown in Mount the Device.
- Choose a mounting location with minimal obstructions to ensure reliable communication.
- Do not apply additional labels to the device, as certain materials may significantly reduce signal quality.
- Do not modify the device or its surroundings in a way that affects antenna performance.
- The system integrator is responsible for ensuring adequate antenna performance and compliance with applicable regulations.
Antenna spacing¶
Maintain sufficient distance between antennas to avoid interference.
- The distance between antennas should be greater than 1/4 of the wavelength
- Avoid distances that are multiples of the wavelength
- When using multiple antennas, base the minimum distance on the lowest frequency
Example:
If using GNSS and Wi-Fi® antennas, maintain a minimum distance of 4.8 cm between antennas.
Internal Antennas¶
Internal antennas are located inside the upper part of the device housing.
The position of the internal antennas is fixed within the device. Signal performance therefore strongly depends on the device orientation and installation environment.
The positions of the internal antennas are shown in the following image.
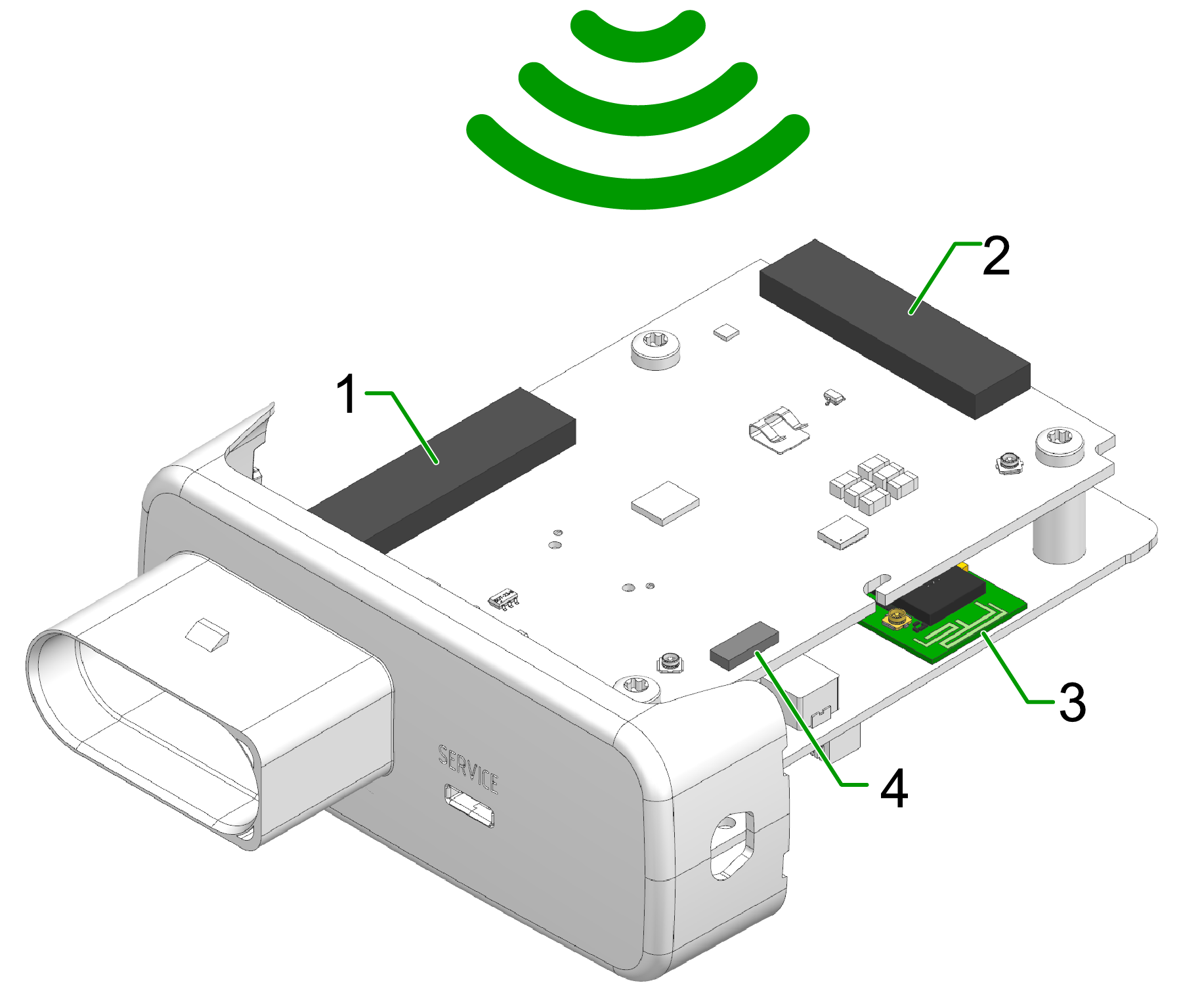
- Diversity cellular antenna
- Main cellular antenna (only for types )
- Wi-Fi / Bluetooth antenna
- GNSS antenna (only for types)
External Antennas¶
The following information applies to device variants with external antenna connectors.
For information on connector types, pin assignments, and instructions to connect and disconnect the antenna cables, refer to the Connectors chapter.
Refer also to the Safety Instructions for applicable safety requirements.
Antenna installation¶
Improper antenna installation may reduce cellular communication and GNSS performance.
- Use only approved antennas which are supplied as accessories by Proemion.
- Optimize the mounting position to reduce the distance between the antenna and the device or order an alternative antenna with longer antenna cable.
- Do not extend the antenna cable.
- Ensure that the minimum bending radius of the antenna cables is at least 8 times the outer diameter.
GNSS Antenna¶
Use only active GNSS antennas with LNA.
For detailed electrical specifications, refer to the CANlink mobile 3600 Datasheet.
For connector details, refer to the GNSS Antenna Interface.
Indicator Elements¶
Two LEDs are installed on the front of the device to indicate functions and status.
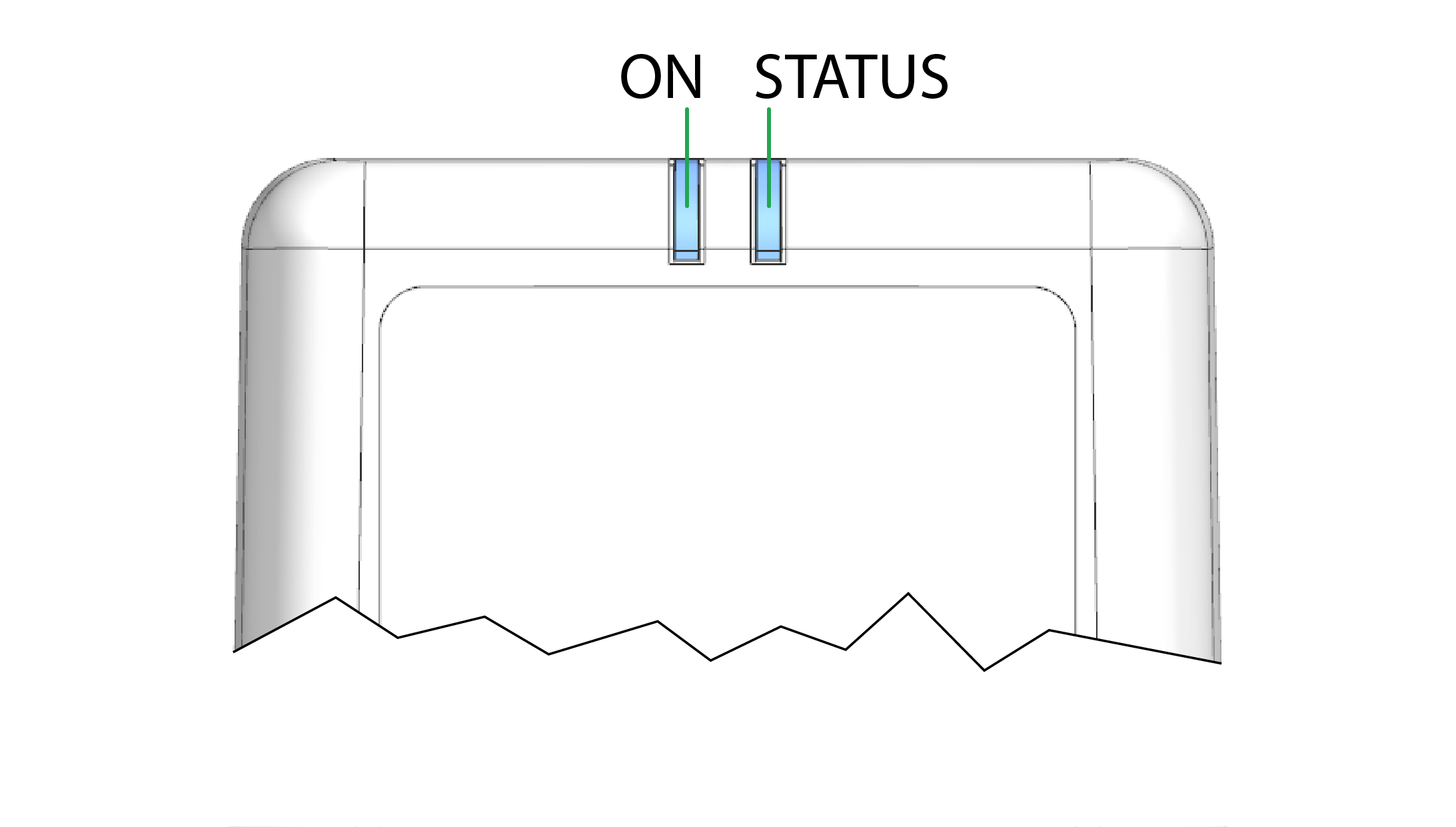
The LEDs have the colors red, green, and blue. When several colors are active simultaneously, the LEDs also light up in magenta, orange, or turquoise.
The following tables show possible LED statuses:
ON LED¶
The ON LED indicates the power supply status.
| Color | State | Meaning |
|---|---|---|
| - | Off | Device switched off or in sleep mode |
| Green | On | Device switched on, terminal 30 voltage in permitted range |
| Red | On | Device switched on, terminal 30 voltage outside permitted range |
| Green | Flashing | Device in diagnosis or update mode |
| Orange | On | Device is in device reset mode. See also LEDs during certain operating modes |
STATUS LED¶
The STATUS LED indicates the operating status of the active connections. The various colors reflect the respective priority, from 6 (low) to 1 (high). If several modes are active simultaneously, the STATUS LED always indicates the status with the highest priority (smallest number).
| Color | State | Connection | Priority | Meaning |
|---|---|---|---|---|
| - | Off | - | - | LED On is also off, the device is switched off. |
| Green | On | Various | - | No Error. Device is connected to the DataPlatform |
| Blue | On | Cellular internet | 1 | Not connected to the DataPlatform. |
| Orange | On | CAN 1 | 2 | Error on CAN 1 interface. |
| Red | On | CAN 2 | 3 | Error on CAN 2 interface. |
| White | On | CAN 3 | 4 | Error on CAN 3 interface. |
| Magenta | On | GNSS | 5 | No position / antenna recognized. |
| Color | State | Connection | Priority | Meaning |
| - | Off | Wi-Fi / Bluetooth | 6 | Not connected to any network / device. |
If there are no errors with the current connection (Cellular, CAN1/2/3, GNSS, wireless interfaces), the STATUS LED lights up green.
When the connection is active, e.g. communication with the DataPlatform, the STATUS LED flashes from time to time. ("Activity flash").
In the event of a fault, the STATUS LED only displays the status with the highest priority.
Example: The device does not recognize any GNSS position (priority 5 = magenta) and has no Cellular connection (priority 1 = blue). The STATUS LED lights up blue.
LEDs during certain operating modes¶
| LED | State | Meaning |
|---|---|---|
| ON / STATUS |  |
Configuration update in progress via the CAN interface. |
| ON / STATUS |  |
Active file transfer. A CAN message is received (flashes_orange) and sent to the DataPlatform (flashes_blue). |
| ON / STATUS | Active data transmission. | |
| ON / STATUS |  |
Device initializing after switching on. |
| ON / STATUS |  |
Configuration update in progress via the DataPlatform. |
| ON / STATUS |  |
Remote firmware update in progress via the DataPlatform. |
| ON / STATUS |  |
Reset (0x1011:0x64) the device via the CAN. |
| ON / STATUS |  |
Transmission of the GNSS position and the keep-alive message. Display varies depending on configured polling interval. |
SIM cards
eSIM card¶
All device types are equipped with an integrated eSIM card.
On delivery, the eSIM card already has an eSIM profile with all the necessary communication settings.
Potential connectivity loss with custom SIM card
The device cannot establish an online connection to the DataPlatform when using a customer specific SIM card and wrong firewall settings at the SIM provider. IP addresses of the DataPlatform may change without prior notice.
- Make sure that the SIM card provider is not using IP address based white-listing for any DataPlatform communication.
- Make sure that - if white-listing is required - the corresponding DNS names are white-listed at the SIM provider's firewall.
On delivery, the device's eSIM card is not yet activated.
After registration of the device, activation of the eSIM card is triggered automatically.
Usually this process takes about 15 minutes. In exceptional cases it can take up to 1 working day.
Nano-SIM card¶
The customizable version of type 3677 is equipped with a nano-SIM card slot instead of an integrated eSIM card. In such cases, the nano-SIM card provided by the customer is already installed and tested at the Proemion factory. Replacing the nano-SIM card in the field is not recommended and may void the warranty.
Potential connectivity loss with custom SIM card
The device cannot establish an online connection to the DataPlatform when using a customer-specific nano-SIM card with incorrect firewall settings at the SIM provider. IP addresses of the DataPlatform may change without prior notice.
- Make sure that the SIM card provider is not using IP address based white-listing for any DataPlatform communication.
- Make sure that - if white-listing is required - the corresponding DNS names are white-listed at the SIM provider's firewall.
Malfunction due to defective nano-SIM cards may occur.
- Make sure that the specification of the selected nano-SIM card meets the environmental requirements of the device.
- Ensure that the dimension of the selected nano-SIM corresponds to form factor 4FF.
Battery¶
Some device types feature an integrated battery (lithium-polymer).
The integrated battery allows it to send logged CAN and position data via the cellular radio interface even if the power supply from the main plug connector is interrupted. The device is not designed for permanent battery operation.
On delivery, the integrated battery is charged by approx. 30%. Before you use the device, charge the battery fully. See Charging the Battery.
A fully charged battery can back up a power failure of approx. 1.5 hours (@ 20°C battery temperature), ensuring active operation of the device.
The following examples provide an overview of the battery runtimes in various application cases.
Example 1:
The rechargeable battery integrated is charged to 100% and the device is permanently switched on and online. The device transmits one file per minute.
The battery runtime is approx. 2 hours.
Example 2:
The integrated battery is charged by 100% and the device is permanently in Sleep mode.
The device switches on cyclically every 24 hours and is online for 5 minutes to transmit the current position and certain internal device parameters. Then the device automatically switches back to Sleep mode.
The battery runtime is approx. 14 days.
Example 3:
The integrated battery is charged by 100% and the device is permanently in Sleep mode.
The device goes online only once, triggered by the acceleration sensor, and transmits the current position (theft monitoring without external power supply).
The battery runtime (operational readiness) is 70 days.
The values stated in the examples can deviate depending on the use purpose, the setup conditions (@ 20°C battery temperature) and the configured device variable GO TO SLEEP VOLTAGE, see Important device variables.
Note on the integrated battery
-
The integrated battery is charged using the power supply via terminal 30 and charging is only possible in a limited temperature range of:
0 °C … +45 °C (+32 °F … +113 °F) -
Battery operation of the device is only possible in a limited temperature range of:
-20 °C … +60 °C (-4 °F … +140 °F)
Note the following information about use of the integrated battery
-
The integrated battery has a limited service life.
After 500 charging cycles, contact the Proemion service to replace the integrated battery, see Chapter Service and Support.
The number of charging cycles can be read out via theBATTERY - CYCLE COUNTdevice variable. See Battery. -
Perform three complete charging and discharging cycles to achieve the full performance capability of the integrated battery.
- During battery operation, it is not possible to use the digital output.
Getting Started
The following sections describe the first steps required for deploying the device. Furthermore, it contains useful information on how to connect, configure, and mount the device.
Installing Software¶
Use the Proemion Configurator software to configure the device.
You can evaluate the data with the DataPlatform or Remote Service Tool.
Use the Proemion Firmware Programmer software for firmware updates.
The software can be downloaded from our Download Center at the Document Library.
| Software | Path on Download Center |
|---|---|
| Proemion Configurator | 03_Proemion Tools Software\01_Software\01_Proemion Configurator |
| CANlink mobile 3000 DeviceAnalyzer | 03_Proemion Tools Software\01_Software\08_CANlink mobile 3000 DeviceAnalyzer |
| Remote Service Tool | 03_Proemion Tools Software\01_Software\04_Remote Service Tool |
| Proemion Firmware Programmer | 03_Proemion Tools Software\01_Software\02_Proemion Firmware Programmer |
| Drivers | 05_Utilities\06_USB Drivers |
| Proemion Machine Companion App | Machine Companion App (Google Play) |
Execute the relevant application file (setup.exe, install.bat_or_similar) and follow the instructions on the screen to install the software on your PC.
External Software¶
| Software | Download link | Description |
|---|---|---|
| Peak USB driver for Peak PCAN-USB (CAN to PC gateway device) | Peak USB driver | Required for Connecting the Device to the PC. The Peak PCAN-USB comes with the Launch Kit. |
Connecting the Device
Connecting the Device¶
When connecting the device to a PC, it may be helpful to use a USB-to-Ethernet adapter, as many PCs have only a single Ethernet port. It is also recommended to connect the device via Wi-Fi if a wired connection is not available.
To protect the device from damage and data loss, a correct wiring and configuration of the power management settings is mandatory. The main purpose of the power management settings is that the device has a safe shutdown before the supply voltage (terminal 30/31) is disconnected.
Warning
Overload damage due to malfunction.
Risk of severe or fatal injury.
- To limit power in the event of malfunction, secure the DC power supply circuit during installation with an external 2 A fuse.
Risk of property damage
- The device must be installed, connected, and commissioned by a qualified technician.
- Ensure the power supply is disconnected before connecting the device.
- Only use components from the launch kit or the accessories supplied. Refer to chapters Launch Kit and Software and Accessories.
If you have any questions or anything is unclear, please contact our support before getting started. See Service and Support.
Note
Device defect due to power failure.
Destroyed hardware component on the device. Repair not possible.
Destroyed file system on the device. Repair by Proemion necessary.
- Permanently connect terminal 30 to steady power supply (vehicle battery) to ensure that the required power management settings can be applied to the device in the right manner.
- Permanent disconnection from the power supply is only permitted when the device was set to sleep mode before.
- Connect terminal 15 correctly and configure secure switching to sleep mode in the Power Management section of the device configuration.
- Do not disconnect the device from the power supply until it has completely switched to sleep mode (all LEDs off).
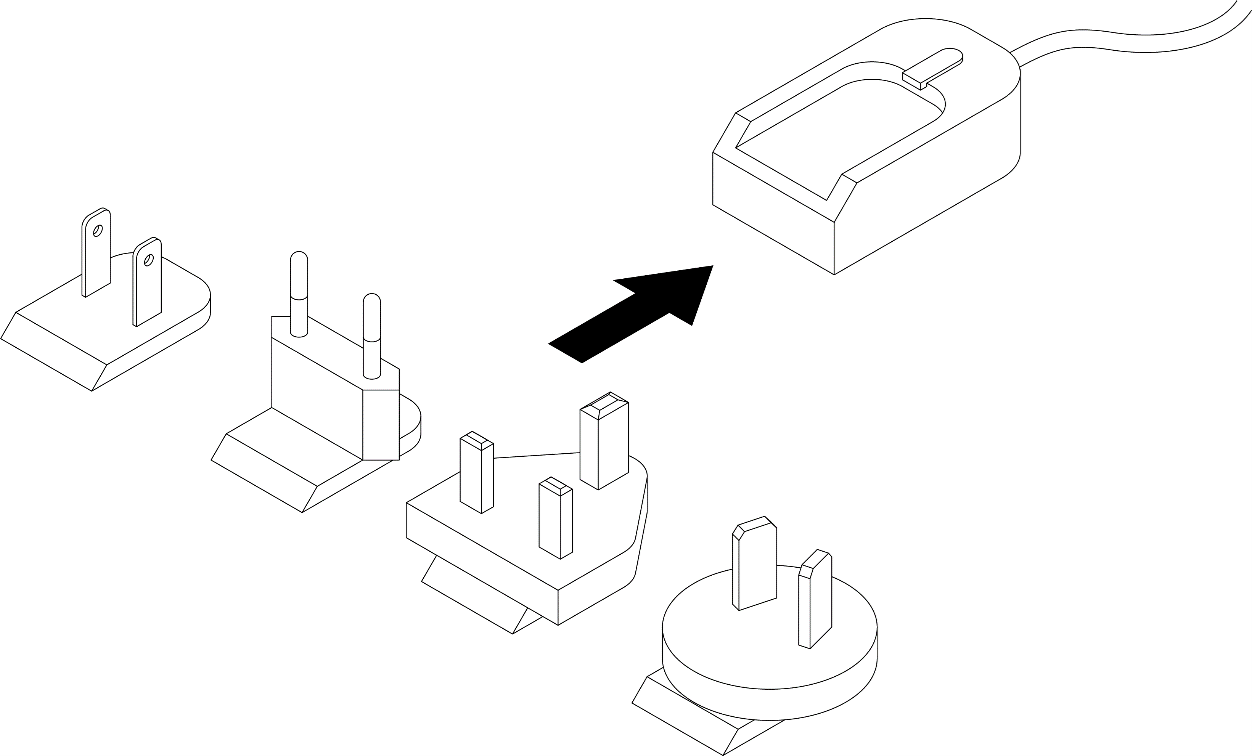
Power Supply¶
The main plug connector supplies the device with power. If you use the power supply unit from the kit, make sure you use the country adapter for your country.
Charging the Battery¶
Before you use the device for the first time, fully charge the integrated battery using main plug connector cable supplied. See Starter Cable for Main Plug Connector.
Lithium-Polymer batteries have a limited storage time and lifetime.
During storage, the charge level must be kept in certain limits.
The limited lifetime reduces the full charge capacity of the battery after 500 charging cycles to 80% of the rated capacity.
Note on batteries in CANlink® mobile 3600 devices
- The integrated battery can only be charged in the limited temperature range of 0 °C ... +45 °C / +32 °F ... +113 °F.
- Battery operation of the device is only possible in a limited temperature range of -20 °C ... +60 °C / -4 °F ... +140 °F
The BATTERY - CHARGE LEVEL device variable provides information on the current charge level of the integrated battery.
The BATTERY - CURRENT device variable (Index 0x5006, Sub-Index 0x09) provides information on the charging status of the integrated battery.
BATTERY - CURRENT > 0: battery is being chargedBATTERY - CURRENT = 0: battery is fully charged,and power is being supplied to the device via terminal 30BATTERY - CURRENT < 0: device is being supplied with power from the integrated battery
Antenna Connection¶
The following device types (3651, 3653, 3657, 3673, 3677) are equipped with external Cellular and GNSS antenna ports.
The Cellular and GNSS antenna (part number 157000121) has two separate connectors:
- Cellular (FAKRA-D, violet)
- GNSS (FAKRA-C, blue)
Cellular Antenna Connector¶
Connect the antenna's FAKRA-D plug (violet) to the device's FAKRA-D port (violet).
- Only use antennas with the maximum gain specified in the Technical Data.
GNSS Connector¶
Connect the antenna's FAKRA-C plug (blue) to the device's FAKRA-C port (blue).
-
Only use active GNSS antennas with:
- LNA
- Gain max. 25 dBi
- Voltage 3.3 VDC
- Current max. 40 mA
Installation Notes¶
- Mount the GNSS antenna so that it is level with the horizon and has a clear view of the sky.
- Do not extend antenna cables.
- Ensure the minimum bending radius of the antenna cable is at least 8 times the outer diameter.
- Use only antennas supplied as Proemion accessories.
CAN Interface¶
Connect the device interfaces to the CAN bus whose data you want to visualize.
For test purposes, connect the device to a PC using a communication gateway (e.g. PCAN-USB - CAN/USB Interface).
The CAN connection terminal CAN-High and CAN-Low signals must match the signals of the connector on the device. You can connect ground of the power supply connector with CAN1-GND or CAN3-GND because the CAN1 and CAN3 interface has no galvanic isolation.
The CAN2 interface is galvanically isolated from the rest of the circuit and must not be connected with supply-GND.
Note
CAN3 has a lower performance compared to CAN1/CAN2.
The following table provides an overview of some CAN baud rates in relation to the bus length:
| CAN baudrate | Maximum bus length |
|---|---|
| 1 Mbit/s | 25 m |
| 800 kbit/s | 50 m |
| 500 kbit/s | 100 m |
| 250 kbit/s | 250 m |
| 125 kbit/s | 500 m |
| 50 kbit/s | 1000 m |
CAN Bus Termination¶
In any bus system, signal reflections at the end of a wire or cable can cause interference which can in turn cause transmission errors.
To minimize the reflections, place a termination resistor at each end of transmission lines.
The terminating resistance between CAN-High and CAN-Low must match the characteristic impedance of the transmission lines.
In CAN bus networks, normally unshielded, twisted cable pairs are used for signal transmission.
The characteristic impedance of the transmission lines is around 120 Ohm. So, the termination resistor between CAN-High and CAN-Low must be rated 120 Ohm.
Switching the Device On/Off¶
The device does not have an on/off switch.
The device can be powered on by each of the following conditions:
- Terminal 15 level is high
- CAN message is present at CAN1 and CAN3 (wakeup via CAN2 is not possible)
- Detection of a specific Acceleration Sensor Wake-up Force
- Cyclic wakeup time is elapsed
PC connection
When connecting the device to a PC (e.g., for configuration with the Proemion Configurator ) make sure that the ignition input signal (Terminal 15, red wire) is supplied with a voltage of at least 6 V (typically 12 V).
Without this signal, the device will not start completely, and the Proemion Configurator may not display full device information in the Node Scan.
If Terminal 15 is not connected, ensure that the shutdown delay in the Power Management configuration is set to 0 s to prevent automatic shutdown.
The device can be set to sleep mode by the following conditions, see Power Management.
Permanent disconnection from the power supply is only permissible if the device has been set to sleep mode before. For further details regarding the different power management functions, please refer to Power Management.
Note
Device defect due to power failure.
Destroyed hardware component on the device. Repair not possible.
Destroyed file system on the device. Repair by Proemion necessary.
- Permanently connect Terminal 30 to steady power supply (vehicle battery) to ensure that the required power management settings can be applied to the device in the right manner.
- Permanent disconnection from the power supply is only permitted when the device was set to sleep mode before.
- Connect Terminal 15 correctly and configure secure switching to sleep mode in the Power Management section of the device configuration.
- Do not disconnect the device from the power supply until it has completely switched to sleep mode (all LEDs off).
Battery low voltage.
In the case of variants with an internal rechargeable battery and no Power Management configuration, the device continues to operate in Battery mode until it is switched off via the low voltage disconnect function.
- Permanently connect Terminal 30 to steady power supply (vehicle battery) to ensure that the required power management settings can be applied to the device in the right manner.
- Connect Terminal 15 correctly and configure secure switching to sleep mode in the Power Management section of the device configuration.
In case the proper settings are not made, you can switch the device off via the Reset button:
Disconnect the main plug connector. Actuate the inlying button using an appropriate tool with a diameter of approx. 1mm.
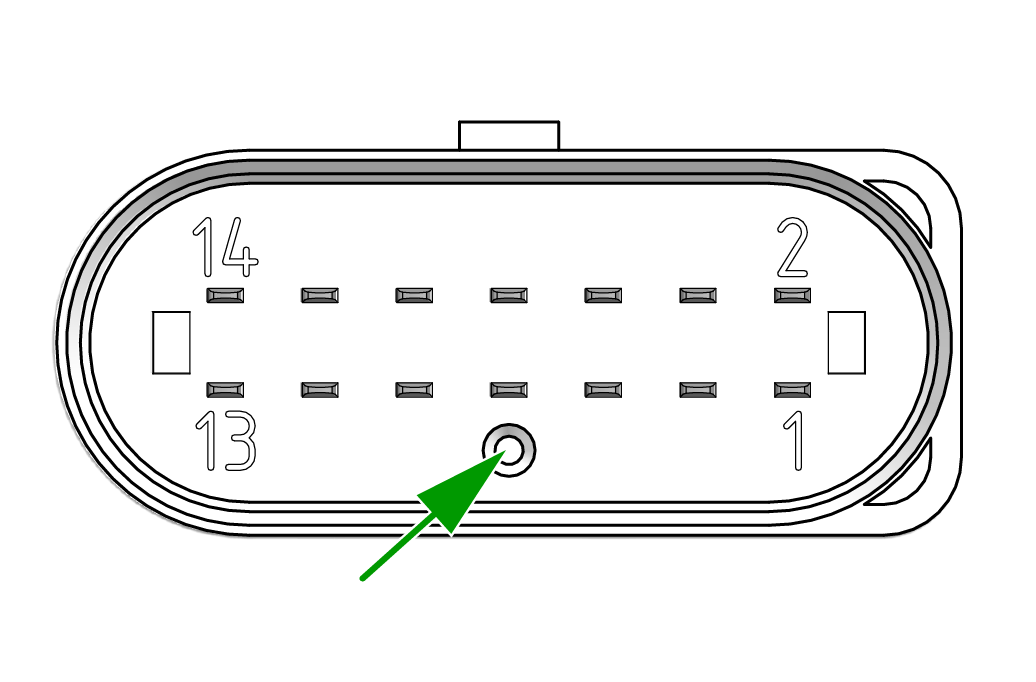
The LEDs and the device are switched off. Please be aware that this is an emergency procedure with the risk of device defect due to power failure!
Activation¶
The CANlink® mobile 3600 is equipped with an integrated eSIM card. Upon delivery, the eSIM card already has an eSIM profile with all the necessary communication settings.
Before you can use the device, it must be activated via the DataPortal.
Note
The user that wants to activate the device needs at least the permission set (Machine:Admin) and the feature switch (Machine_Lifecycle) must be enabled for the user's organization unit. If this should not be the case, please get in contact with the administrator of your organization or our support team. See Service and Support.
For more information, see the chapters Permissions > Machines Service and Feature Switch in the DataPortal User Manual.
-
Log in to the DataPortal.
-
Go to Administration > Overview.
-
Select the Machines tab.
-
Select Provision Machine button and follow the instruction in the chapters Provisioning and GoLive in the DataPortal User Manual for activating the device.
Note
The customizable version of the device variant 3677 is equipped with a nano-SIM card.
If a device of a customized 3677 variant has to be activated, the system integrator must ensure that the corresponding nano-SIM card and the necessary services are activated for the respective country of use.
Warning
Note that in order to permanently operate an imported cellular communication unit (TCU) in Türkiye (possible with device variants 3613 VarN-SIM Türkiye and 3653 VarN-SIM Türkiye, it must be registered with the Turkish authorities.
The importer of the TCU or the machine equipped with a TCU is responsible for performing their registration. The registration requires a Turkish electronic identification and payment of a registration fee.
For additional information, please contact Service and Support.
Configuring the Device¶
The device is delivered with a basic configuration. Customize the configuration to your purposes by defining the CAN messages to be logged.
You load new configurations to the device via CAN interface or the DataPortal. The configuration described below uses the CAN interface.
For more detailed information on configuration using the DataPlatform, see chapters Configuration update and Safe Remote Updates Guideline.
Connecting the Device to the PC¶
To configure the device with a PC, you must connect it with the PC.
Note
In the following example, the PCAN-USB, included in the Launch Kit, is used. You must first install the PEAK PCAN-USB driver to use the PCAN-USB for the configuration of the device, see Installing Software.
-
Connect the PCAN-USB - CAN/USB Interface to a USB Port on the PC.
-
Place a CAN bus termination on the D-Sub connector of the PCAN-USB - CAN/USB Interface.
-
Use the cable Starter cable for main plug connector with the CAN1 or CAN2 plug to connect the CANlink mobile to the CAN-bus termination of the PCAN-USB - CAN/USB Interface.
-
Use the cable Starter cable for main plug connector and the power supply unit from the launch kit to connect the CANlink mobile to the power grid.
✓ The ON LED lights up in constant green.
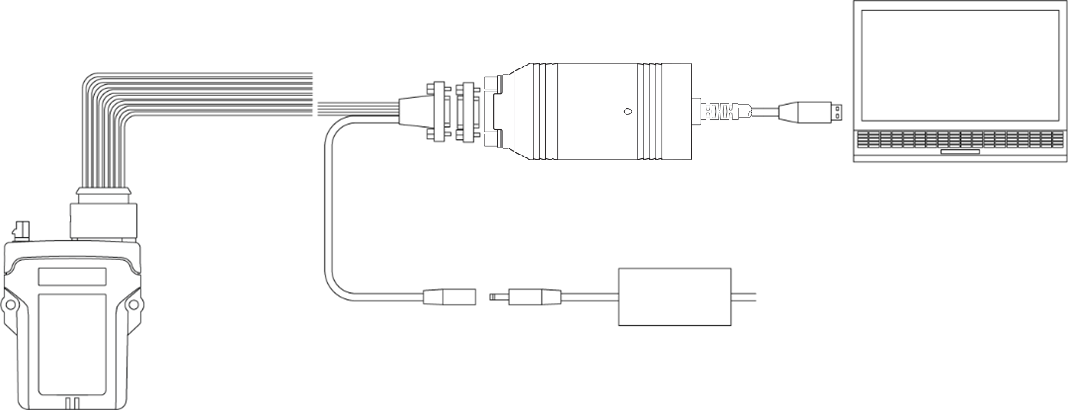
Image of PCAN-USB copied from PCAN-USB User Manual.
Note
Please be aware that the CANlink mobile 3600 is not equipped with an integrated CAN bus termination resistor.
The displayed laboratory setup above will work with just one CAN bus termination resistor.
When doing the system integration at the intended machine, it must be ensured that the CAN bus is terminated with a CAN bus termination resistor of 120 Ohm at each end of the CAN bus line.
Also refer to CAN Bus Termination.
Making Communications Settings¶
Before you can start using the device, you must define the communication settings once.
Note
Install the USB driver pack from the Download Center before connecting the device to a PC using a USB port. See Installing Software.
-
Connect the device to a PC. See Connecting the Device to the PC.
-
Start the Proemion Configurator software.
-
To open the COMMUNICATIONS SETTINGS, in the menu bar click the
 Communication Gateway icon.
Communication Gateway icon.✓ The window COMMUNICATION SETTINGS opens.
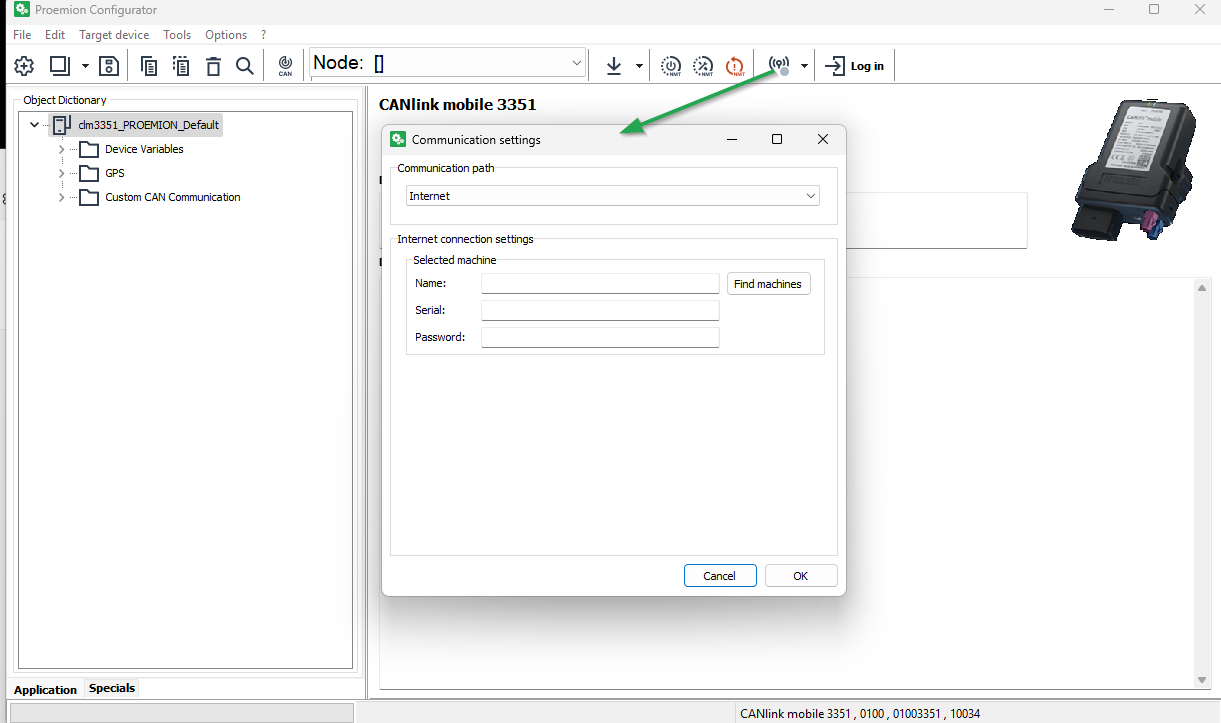
Figure 2: Communication Settings -
In the Communication path, select PEAK PCAN-USB as the device.
-
In the PEAK PCAN-USB settings, select Baudrate: 250 kbit/s.
✓ You have completed the communication settings.
Node Scan¶
Perform a node scan to check the connection.
-
Connect the device to a PC. See Connecting the Device to the PC.
-
Start the Proemion Configurator software.
-
Click on TOOLS > NODE SCAN in the menu. Alternatively, you can click on the button in the toolbar.
✓ The COMMUNICATION-NODE SCAN INFORMATION window opens.
-
Click on the START NODE SCAN button.
✓ The CAN devices connected are displayed with their CAN open Node-IDs, product codes, and information on hardware and software versions.
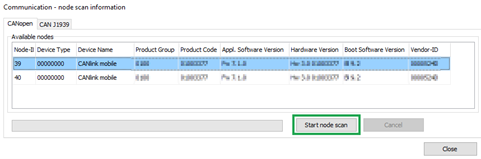
-
Select the device you want to configure.
-
Click on the CLOSE button.
✓ The Node-ID and the designation of the selected device are shown in the toolbar.

Customizing the demo configuration File¶
-
Connect the device to a PC. See Connecting the Device to the PC.
-
Start the Proemion Configurator software.
-
Click on the arrow in the toolbar and select DEMO CONFIGURATION FILES.
✓ The OPEN DOD FILE window is shown.
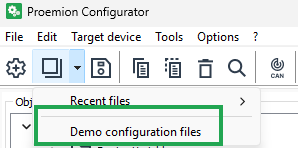
-
Navigate to the correct folder for your device (in_this_example_CANLINK_mobile_3651) and open one of the files with the extension *.DOD.
✓ The selected demo configuration file is loaded.
-
Click on FILE > SAVE AS... in the menu.
-
Save the file under a different name to avoid overwriting the original file.
Tip
You can enter a designation for the configuration in the DEVICE CONFIGURATION VERSION STRING object of the DEVICE VARIABLES.
This text is displayed as a DOD version in the DataPortal under Communication Unit Details and in the configuration version history.Use an unequivocal designation for every configuration. Differentiate between various versions of a configuration by adding a version number.
-
Adjust the configuration file to your requirements. See Proemion Configurator.
-
Customize the DEVICE CONFIGURATION VERSION STRING
-
Enter notes on the adaptations completed in the DOD INFORMATION field.
Note
Save the file with the current configuration in case you need the configuration again later.
It is not possible to read off the current configuration from the device.
Note
If there is no Demo Configuration file available, you must create a new configuration for the device.
The Object Dictionary Groups and DEVICE VARIABLES required must be set-up manually in this case. See Creating Object Dictionary Groups and Objects.
Loading the Configuration to the Device via CAN Interface¶
After you have created your own configuration file, load the configuration to the device.
-
Connect the device to a PC. See Connecting the Device to the PC.
-
Start the Proemion Configurator software.
-
Define the communication settings for the PCAN-USB - CAN/USB Interface device. See Making Communications Settings.
-
Complete a Node Scan and select the CAN node of the corresponding device.
-
Choose FILE > OPEN... from the menu.
-
Open the desired configuration file.
-
Select the APPLICATION tab.
-
Click on the DOWNLOAD ALL ENTRIES button in the toolbar.
✓ The DOWNLOAD DATA TO DEVICE window is shown.
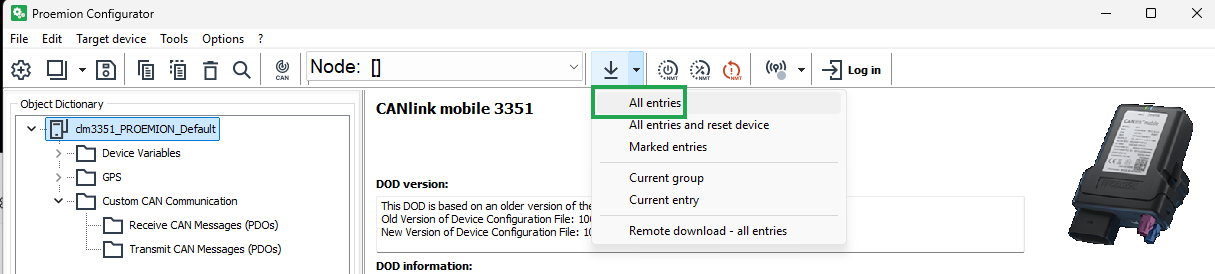
-
Click on the START button to start the download to the device.
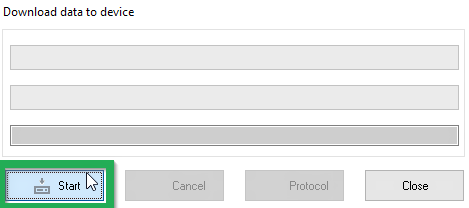
-
Wait until the download is completed.
Note
Loss of function or configuration.
Disconnection from the power supply during the update process can lead to a loss of the function or the configuration.- Do not disconnect the power supply during updating.
✓ The configuration has now been installed on the device.
-
Click on the RESET CAN NODE button.
-
If you have changed the CAN baud rate (DEVICE CAN BAUD RATE) in the configuration, check whether the configuration has been correctly adopted.
-
Change the CAN baud rate of the PCAN-USB - CAN/USB Interface. See Making Communications Settings.
-
Perform a Node Scan to check the connection.
✓ The ON LED lights up in constant green.
✓ The STATUS LED flashes green, then lights up in constant green.
Note
For further information on how to perform a remote configuration update, please refer to chapter DataPlatform
Connecting the Device to the DataPlatform¶
Before starting the device for the first time, you must connect it to the DataPlatform.
-
Connect the power supply unit with the power connector of the starter cable for main plug connector cable.
-
Plug the power supply unit into the mains power supply.
✓ The ON LED lights up in constant green.
✓ The STATUS LED flashes green.
-
Wait until the STATUS LED lights up continuously.
✓ The device is now connected to the DataPlatform.
-
Log into the DataPortal and check that the device is connected to the DataPlatform.
-
If your device does not appear in the machine overview, you must activate the device first.
Installation Study¶
In order to ensure correct operation of the CANlink® mobile hardware when it is installed on the machine under real setup and environmental conditions, Proemion recommends performing an installation study..
The installation study ideally consists of two phases:
| # | Phase | Description |
|---|---|---|
| 1 | Verification | In the initial phase of the installation study, it is essential to verify the setup requirements in regards to the specification of the CANlink® mobile. |
| 2 | Validation | During the validation phase, the device is tested under real operating conditions and its suitability for the planned application is assessed. Several iterations and corrective actions may be required at this stage. |
Verification¶
The machine manufacturer and system integrator needs to clarify the issues according to the checklist below:
| # | Checkpoint |
|---|---|
| 1 | Specify the setup and environmental conditions of the planned application at the final destination of the machine. |
| 2 | Ensure that the setup conditions within the machine and the environmental conditions meet the specification of the CANlink® mobile. |
| 3 | Make sure that the CANlink® mobile can be installed according to the recommendation in the chapters Mount the Device including Cables. |
| 4 | Check that the antenna can be installed and aligned as recommended in chapters Cellular and GNSS Antenna and Antenna Positioning. |
| 5 | Check that the recommended settings from chapter Power Management can be realized with the machine setup. |
Validation¶
Once the Verification of the setup and environmental conditions regarding the specification of the CANlink® mobile was completed, it is recommended to proceed with the validation. At this stage of the system integration, the suitability of the CANlink® mobile for the above-mentioned criteria under real setup conditions must be determined. It is also advisable to evaluate the setup already in the prototype phase concerning power management, remote update ability, data consumption, remote and signal strength.
Prerequisites¶
Before the validation can be started, the machine manufacturer and system integrator must meet the following requirements:
| # | Prerequisite |
|---|---|
| 1 | The machine and the programming of its control units correspond to the final series status. |
| 2 | The machine is available for validation under real operating conditions for at least one week. |
| 3 | The CANlink® mobile is installed according to Mount the Device. |
| 4 | The CANlink® mobile is wired according to Cables and Power Management sections. |
| 5 | The CAN baudrate(s) of the CANlink® mobile are set correctly. The default CAN baudrate is 250 kbit/s. Please make sure that the CAN baud rate (s) at the machine are matching the CAN baud rates of the individual CAN interfaces of the CANlink® mobile. |
| 6 | The antenna is installed and aligned according to Cellular and GNSS Antenna](connectors.md) and Antenna Positioning. |
| 7 | All cables, antennas, hoses, etc. must be laid and connected. |
| 8 | All housing parts of the machine must be installed according to the final series status. |
| 9 | The CANlink® mobile was activated according to Provisioning / Go Live and is available with the status live within your DataPortal account. |
For more information regarding the initial setup, also refer to the document CANlink mobile 3600 Quick Start Guide.
Perform Installation Study¶
In case that the necessary prerequisites are fulfilled, it is recommended to perform an installation study under real setup and environmental conditions.
-
Login with your DataPortal user.
-
Check the firmware status of the CANlink® mobile according to chapter Firmware Management at the DataPortal User Manual. If necessary, update the firmware of the CANlink® mobile to the latest official firmware version.
Note
Whenever a remote update is done, it is recommended to follow the instruction according to the Safe Remote Updates Guideline.
-
Use the following PDC template containing the necessary elements: PDC Template. For a reference of the metrics to be used, go to the Download Center under:
02_DataPlatform Documentation > 03_Data Transfer and Interpretation > Proemion_DemoConfig.pdc. Assign the PDC to the corresponding machine model which needs to be evaluated. See also chapter PDC Management in the DataPortal User Manual. -
Download the demo configuration for the used CANlink® mobile from the Download Center under:
01_Proemion > 01_CANlink mobile 3600 > 02_Configuration > 01_StandardNote
The PROEMION_DemoConfig.pdc and clm36xx_Proemion_DemoConfig.DOD configuration files are designed to transfer and parse a few selected standard metrics from the J1939 standard, as well as values from the internal sensors. In the installation study, in particular the acceleration values and the device temperature are taken into account.
Note
In case that the machine data is not in accordance with the J1939 standard, add the device parameters to the customized device configuration and PDC.
Please get in contact with the Proemion Support for further assistance with the configuration of the test setup. -
Open the clm36xx_Proemion_DemoConfig.DOD with the Proemion Configurator software. Please also refer to Configuring the Device.
-
Ensure that the configuration contains the operations Calculate_Shock_Max and Calculate_Temperature_Max.
Demo Configuration for Install Study
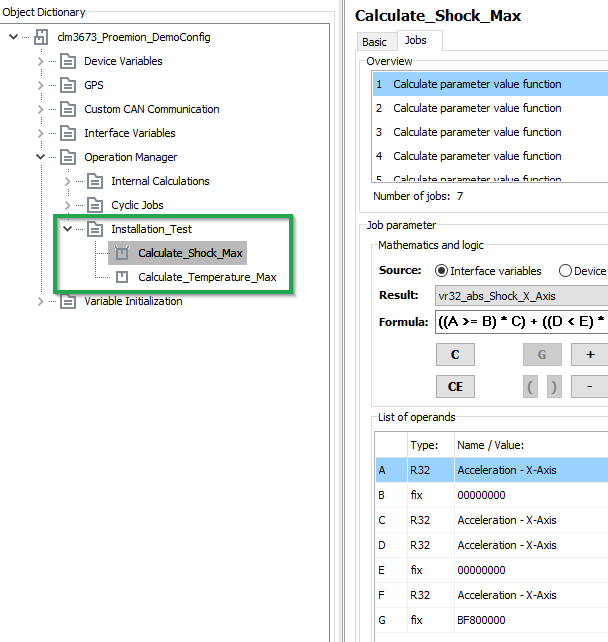
Figure 1: DemoConfigInstallStudy1 Note
If the required demo configuration for your specific variant of the CANlink® mobile is not available at the Download Center yet, please get in contact with the Proemion Support.
-
Adapt the configuration in regard to CAN baudrate and Power Management.
Note
It is essential for a successful installation study and optimized data consumption, to have already a clarified concept about the required Power Management settings and the connected CAN bus. Ideally, the terminal 15 monitoring is established and there is no CAN traffic when the ignition key is off.
-
Update the device configuration according to chapter Configuration update via DataPlatform.
Note
Whenever a remote update is done, it is recommended to follow the instructions according to the Safe Remote Updates Guideline.
-
Check the status of the communication unit. See chapter Communication Details at the DataPortal User Manual manual.
Communication Unit Update History
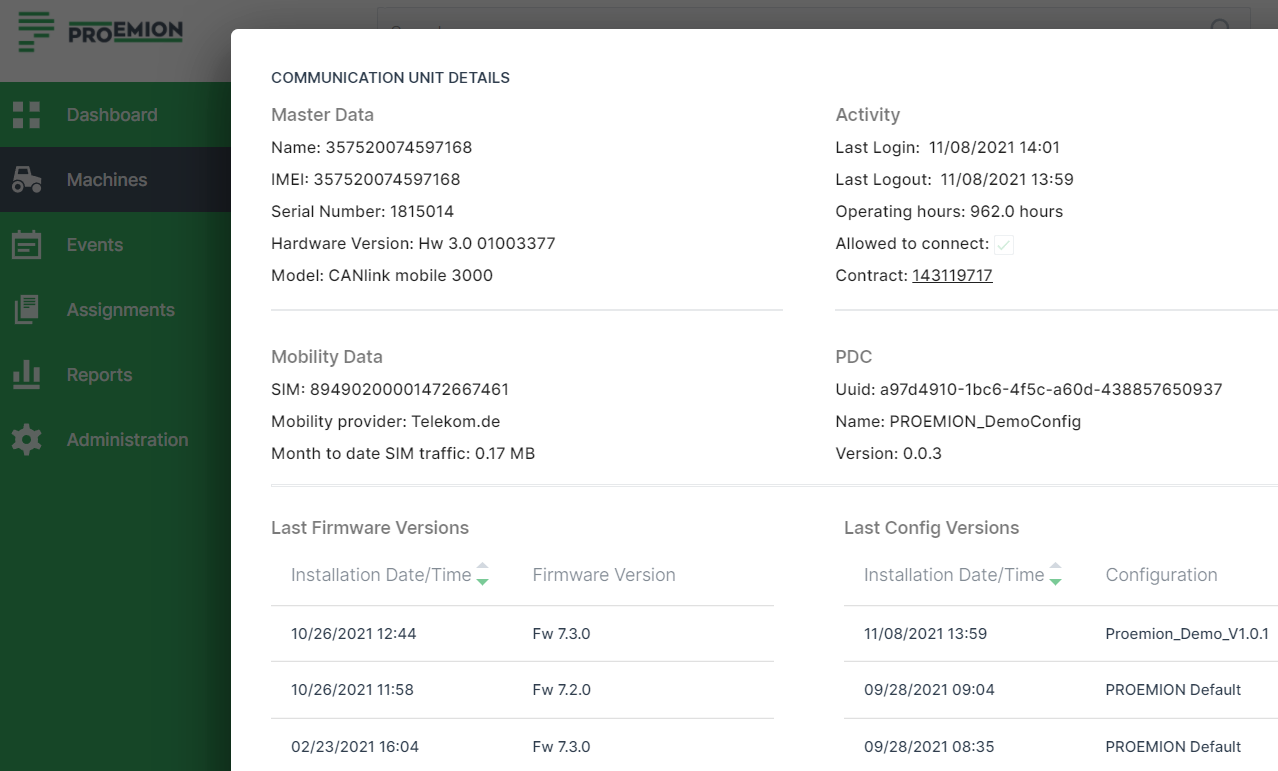
Figure 2: {{ eightin }} -
Once the configuration files are installed and assigned, start with the install study under real conditions of use and monitor the parameters as mentioned in the table
# Check 1 Ensure that the wakeup and shutdown behavior is correct and in accordance with recommended Power Management settings. 2 Ensure that the device temperature stays within the allowed range during real machine operation. 3 Monitor the maximum shock values. Perform corrective action if it turns out that there is too much vibration and shock at the installed CANlink® mobile. 4 Monitor the mobile network signal quality. Optimize the antenna position if necessary. 5 Ensure that the logged metrics from the machine are displayed correctly. Check the CAN bus connection if necessary. 6 During the system integration also monitor the current mobile network mode. 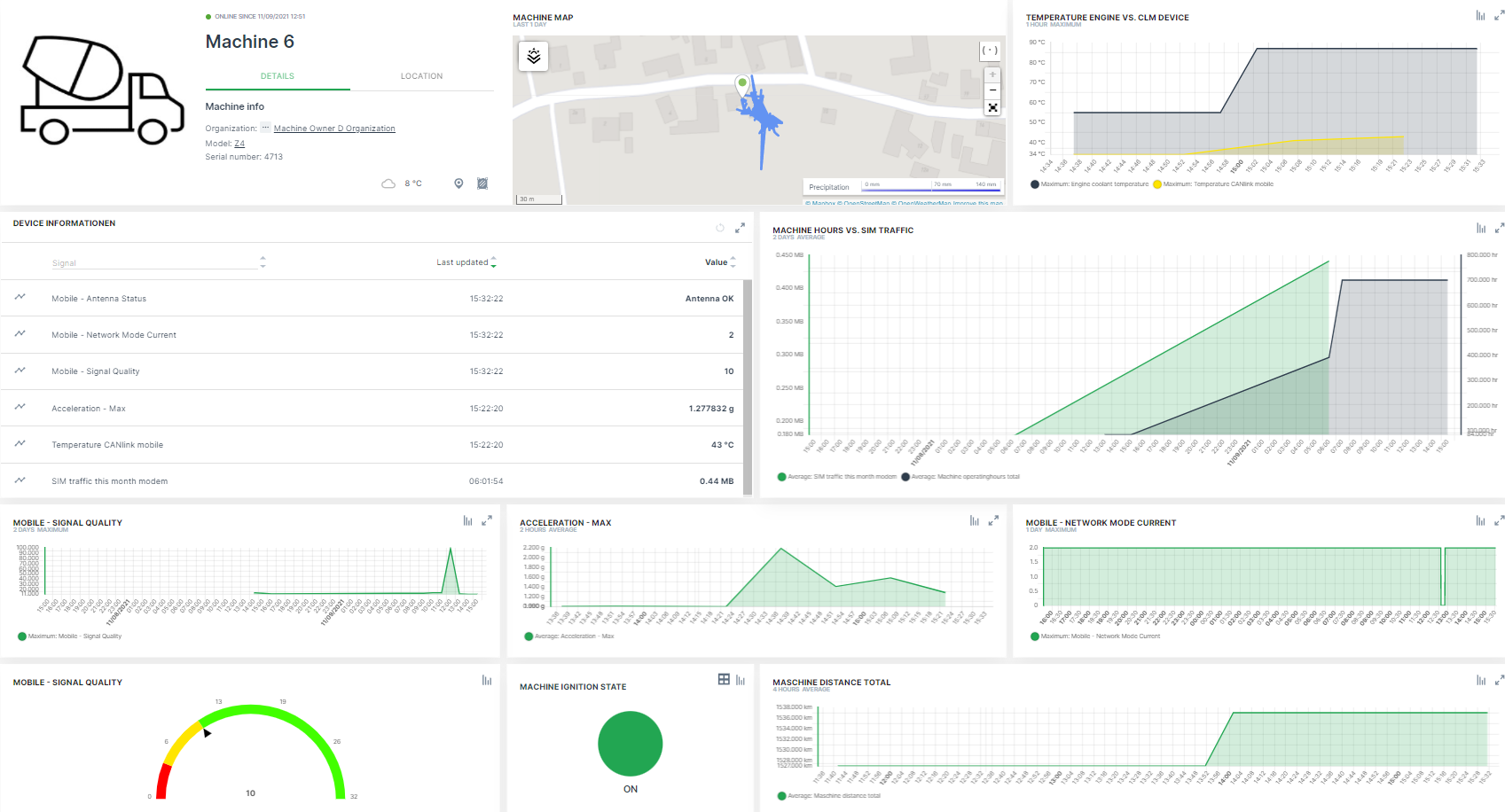
Figure 3: Dashboard for Monitoring Note
Please get in contact with support@proemion.com, if further assistance with adding the necessary device parameters to the logging configuration and default PDC file is required.
-
Once the install study with the default configuration is completed, install and assign your customized configuration files (
.dodand.pdc). -
With the customized configuration files installed, check again the power management settings. Make sure that the device is switched on and off by the terminal 15.
-
Ensure that all configured signals are complete and transmitted correctly.
-
Check the SIM traffic in relation to the machine operation hours and transmitted signals. Make sure that the consumed data volume under real conditions of use corresponds to the selected hosting contract. For information on the availability of the Proemion tariffs for each country, see Cellular Dataplan.
-
Carry out continuous visual checks on the hardware.
-
When the installation study is complete, ensure that CANlink® mobile has not been adversely affected in the tested mounting position.
# Check 1 Ensure that the device was not harmed by water ingress during the installation study. 2 Ensure that the housing material of device was not harmed by chemicals during the installation study. 3 Ensure that the device and its cable management was not harmed by maximum shock values. -
In the event that the installation study has revealed any weak points, take appropriate corrective measures and repeat the installation study.
-
Perform the configuration update with the
*.dodfor the final application. Follow the instructions from the Safe Remote Updates Guideline. -
When the installation investigation has been successfully completed, adjust your device configuration PDC Management and Dashboard Management for the final application. The recording of device temperature, shock values, signal quality, etc. is not required for the customer application.
Mounting
Mount the Device¶
Mount the device using two socket-head screws (M5). Insert the screws into the mounting holes on the sides and fasten them to the mounting surface. Tighten the screws with a torque of 2.2 Nm.
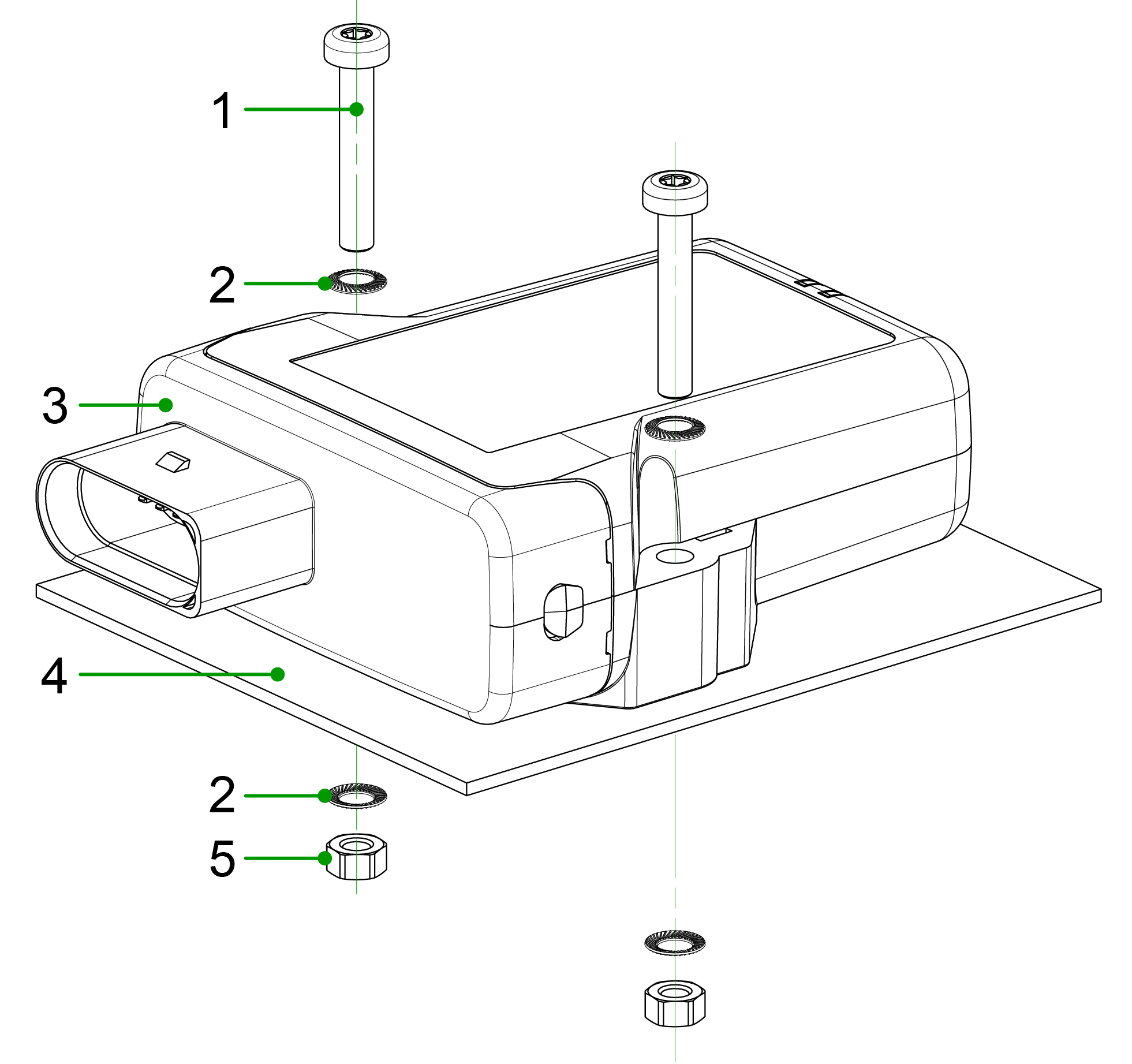
- Socket-head screw
DIN 912 – M5 x 30 mm - Lock washer
M5, di/da = 5.3 / 9 mm - CANlink® mobile 3600
- Mounting surface
D = 3 mm - Hexagon nut
DIN 934 / ISO 4032 – M5
Mounting Orientation¶
Follow these guidelines to ensure correct mounting orientation for proper functionality, environmental protection, and radio signal reception.
The illustration below shows the mounting orientations of the device:
- A–C: Allowed, ensures water ingress and fire protection
- F: Conditionally allowed, fire protection only; no water exposure permitted
- D–E: Not allowed, no water or fire protection
Only use the mounting orientations shown here.
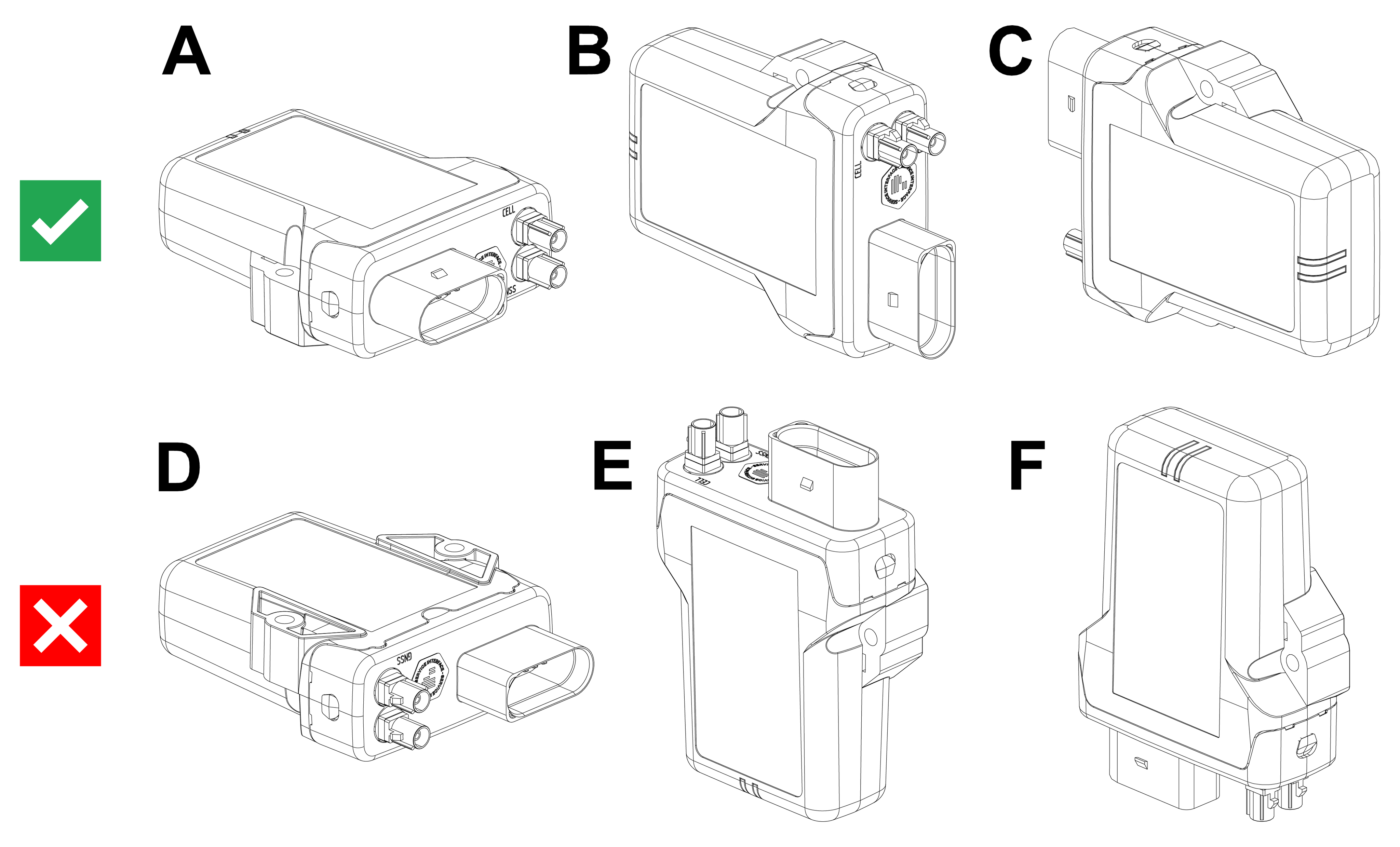
Fire Protection
The LED view elements do not comply with the flammability class required for a fire protection housing.
Plug Orientation
- Plugs must point to the left or right
- Do not mount with plugs pointing upwards
- Avoid mounting with plugs pointing downwards (risk of water ingress)
Mounting in Wet Environments¶
For installations exposed to weather or other sources of water, ensure that the mounting prevents water ingress and accumulation.
- Ensure a gap of ≥ 5 mm between the housing and the mounting surface to prevent capillary action
- Select a mounting orientation that allows water to drain and prevents water retention
- Ensure that no water accumulates around the pressure-compensation element
If exposure to water cannot be avoided:
-
Install protective covers or shrouds if the device is exposed to water1.
-
Use nonmetallic materials (e.g. plastic) to avoid interference with radio signal reception
- Use spacers or a mounting plate if required
Additionally:
- Ensure that cable ends are properly sealed to prevent water ingress due to capillary action
Avoid mounting the device in positions directly exposed to rain or intense sunlight, as this may affect the ingress protection.
-
Protective covers are not distributed by Proemion. They must be obtained directly from manufacturers (e.g., Schlemmer; minimum order quantity may vary). ↩
Operation
The following sections contain information on operating the device and the Proemion Configurator software
Proemion Configurator¶
Configure the device using the Proemion Configurator. See also Customizing the demo configuration File. To alter the configuration of your device, first connect it to the PC. See Connecting the Device to the PC.
Note
Before you connect the device to a USB port on your PC, install the USB driver packet from the {{ tools }}. See Installing Software.
Note
You can find additional information on the individual objects (device_variables) in Proemion Configurator under the Additional Information field for each object. Always use the latest version of Proemion Configurator with the updated information texts.
Tip
Download the current software version from our website.
The Proemion Configurator software can be downloaded at our website: Document Library or {{ tools }}.
Note
In case of problems, the Connectivity Check utility can be used to check the connectivity of our software tools with our services from your site's network.
Creating Object Dictionary Groups and Objects¶
You can use the Proemion Configurator tree structure to create, rename, or delete object dictionary groups or objects.
This chapter explains how to create object dictionary groups and objects.
The following example shows creation of the object RECEIVE MESSAGE PDO. This object is used to receive and log CAN messages.
Note
Since the firmware release 2.0.0 in February 2023, virtual CAN messages have been extended to log up to 32 variables for virtual CAN message in the CAN Receive Message handling (CRO) and for virtual messages in the OPERATION MANAGER. This allows users to pack more information into a single message.
To create the object, you need the CUSTOM CAN COMMUNICATION object dictionary group and then the RECEIVE CAN MESSAGES (PDOs) object dictionary group.
-
Start the Proemion Configurator software.
-
Choose FILE > OPEN from the menu and select the configuration file you want.
-
In the tree structure, open CUSTOM CAN COMMUNICATION > RECEIVE CAN MESSAGES (PDOs).
-
Right-click to open the context menu and select NEW OBJECT DICTIONARY GROUP > RECEIVE MESSAGE (PDOs)
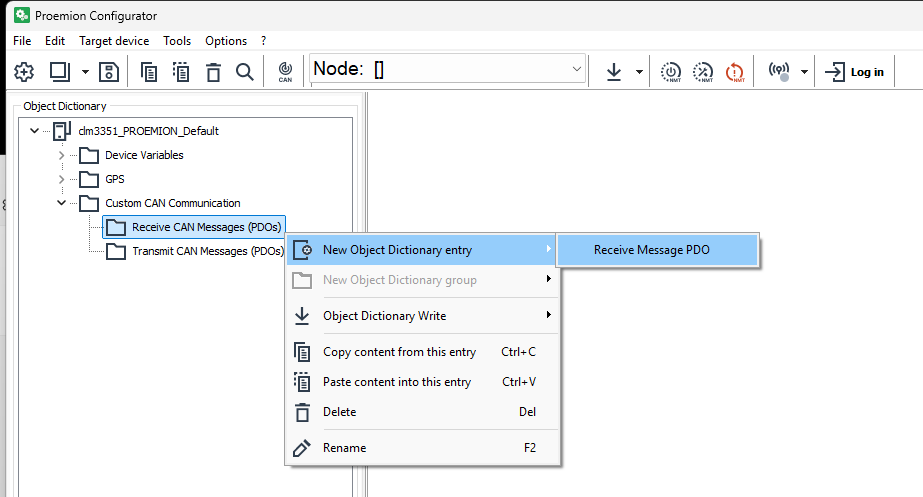
Figure 1: Object Dictionary Group - RECEIVE CAN MESSAGES (PDOS) -
In the NUMBER OF NEW OBJECTS field, enter how many objects (received_messages) you want to create.
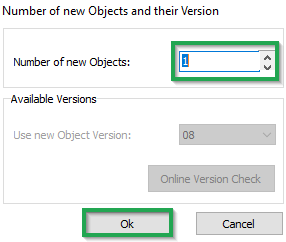
Figure 2: NUMBER OF NEW OBJECTS -
Click OK.
✓ The object RECEIVE MESSAGE PDO is created.
-
To rename an entry in the tree structure, click on the corresponding entry to select it. Click on the entry again to rename it.
RealTime Operation¶
As described in chapter Functions, the Online Mode covers both the transmission close to RealTime and Logging of CAN messages and data.
Note
With the firmware release 2.0.0 as of February 2023, the CANlink® mobile 3600 operates as "Online" that combines the RealTime mode and Logging mode, see also chapter Online (RealTime and Logging.
Before starting RealTime transmission, check the device status in the machine list in the DataPortal. The colored dot in the Machines list indicates the connection status:
- grey - device is offline
- green - device is in Logging mode
- blue - device is in RealTime mode
For further information on the DataPortal functionality, refer to the DataPortal DataPortal User Manual.
Creating a RealTime Connection and Evaluating CAN messages¶
For a RealTime connection and evaluation of CAN messages, you can use the Remote Service Tool software.
For more information on how to configure and use the Remote Service Tool software, refer to the Remote Service Tool Manual.
Setting a Reception Filter¶
You can filter CAN messages for transmission to the DataPlatform. Set the filters by using the Remote Service Tool software.
For more information on how to configure and use the Remote Service Tool software, refer to the Remote Service Tool Manual.
Logging¶
Note
With the firmware release 2.0.0 as of February 2023, the CANlink® mobile 3600 operates as "Online" that combines the RealTime mode and Logging mode, see also chapter Online (RealTime_and_Logging.
The device logs CAN messages, GNSS data, and internal variables.
All the recorded data is saved in an internal, nonvolatile memory and automatically sent to the DataPlatform when a connection is available.
Note
The internal nonvolatile memory also stores recorded data as *.CLF-files. The maximum number of files which can be stored on the internal memory is 4000 files with a file size up to 1 KB. When the total of 4000 files is reached, newly saved files will overwrite the oldest file.
Note
The colored dot in the machines list indicates the status:
- Grey – device is offline.
- Green – device is online and it is logging data.
- Blue – device is online and it transmits RealTime data.
For further information on the DataPortal functionality, refer to the Document Library.
Configuring variables for CAN communication¶
To enable CAN communication and data logging, you must configure the following variables.
CAN Settings¶
The variables required concern the CAN connection and belong to the object dictionary group DEVICE VARIABLES.
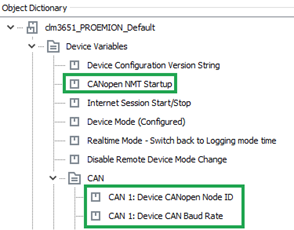
| Variable | Value | Function |
|---|---|---|
| CANOPEN NMT STARTUP | 0 |
Automatically sets the device to CANopen mode "Operational". |
| CAN1/CAN2/CAN3:DEVICE CANOPEN NODE-ID | 1 … 127 |
The CANopen node address (can_be_left_at_the_standard_value). |
| CAN1/CAN2/CAN3:DEVICE CAN BAUD RATE | min. 50 kbit/s; max. 1 Mbit/s (default: 250kBit/s) | The baud rate at which the CAN bus operates. |
Logging Variables¶
The variables required concern the logfile and belong to the DEVICE VARIABLES > LOGGING object dictionary group.
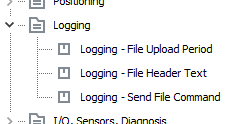
| Variable | Function |
|---|---|
| LOGGING -- FILE UPLOAD PERIOD | Period in which the logfile is completed and sent to the DataPlatform. value = 0 → data is sent when the size of the logfile reaches 1 kB. |
| LOGGING -- FILE HEADER TEXT | Information text in the header of each logfile. Can contain version information for instance (max. 32characters). |
| LOGGING -- SEND FILE COMMAND | Assign any value to the variable during operation in order to immediately close and transfer the existing logfile. |
Note
The logfile is sent to the DataPlatform when its size reaches 1kb regardless of the period set.
Logging Mode Examples
CAN logging Example 1 - Cyclic logging¶
In the following, the example of a J1939 message is used to explain the general procedure for configuring CAN reception messages. The procedure can also be applied to other CAN messages from other CAN protocols. For detailed information on creating objects, see Creating Object Dictionary Groups and Objects.
CREATING A PGN 61444¶
-
Create the object dictionary group CUSTOM CAN COMMUNICATION > RECEIVE CAN MESSAGES (PDOS) .
-
Create the RECEIVE MESSAGE PDO object in the RECEIVE CAN MESSAGES (PDOS) object dictionary group you have created.
-
Rename the RECEIVE MESSAGE PDO object to PGN 61444.
RECEIVE MESSAGE COMMUNICATION PARAMETERS¶
-
Select the COMMUNICATION tab
-
Make the following settings.
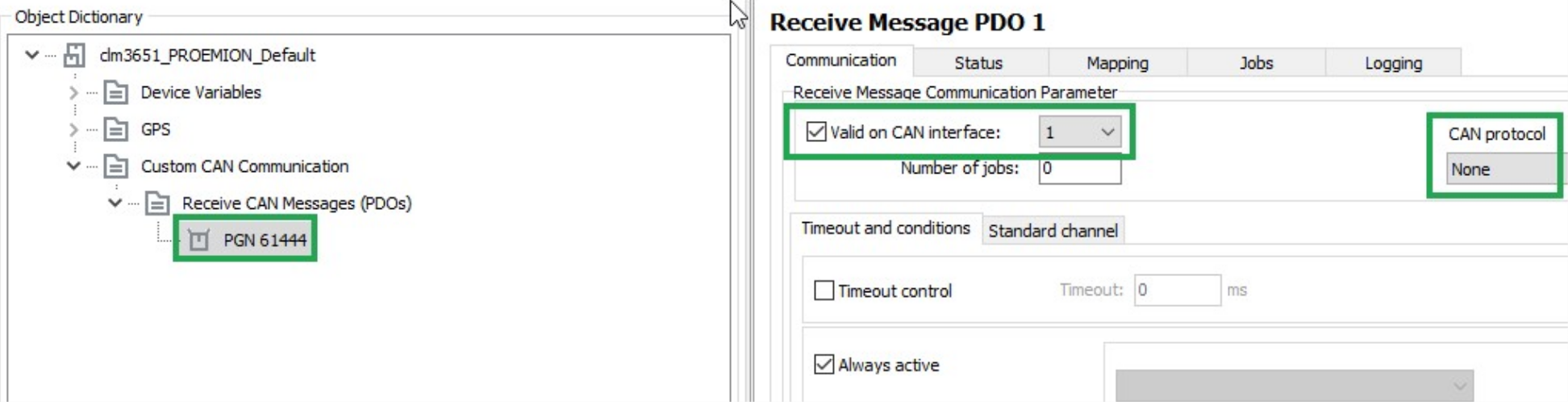
Description Selection Function VALID ON CAN INTERFACE Set Enabling the configuration, defining the CAN interface for reception (if_several_are_available). CAN PROTOCOL None The received CAN message is a single message (Layer_2). It is not treated according to a superordinate CAN protocol.
TIMEOUT AND CONDITIONS¶
Select the TIMEOUT AND CONDITIONS tab.
Make the following settings.
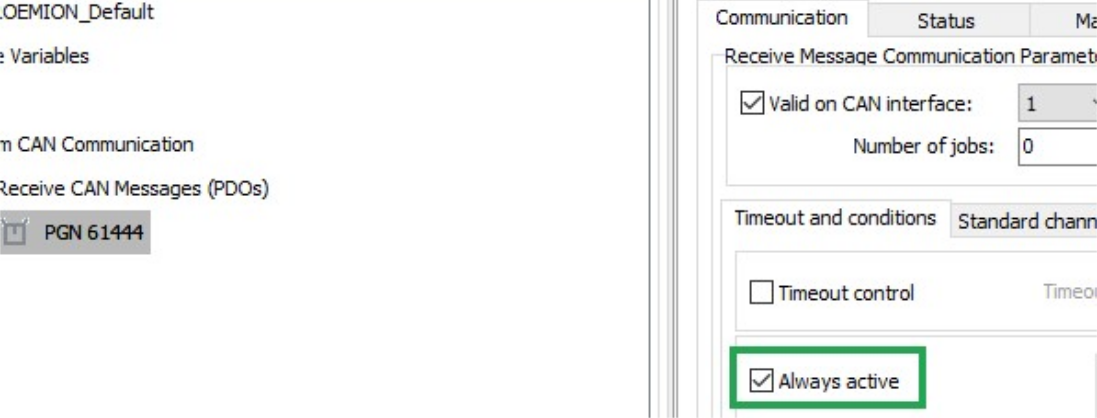
| Description | Selection | Function |
|---|---|---|
| ALWAYS ACTIVE | Set | The CAN message is received irrespective of events or conditions. |
STANDARD CHANNEL¶
Select the STANDARD CHANNEL tab.
Make the following settings.
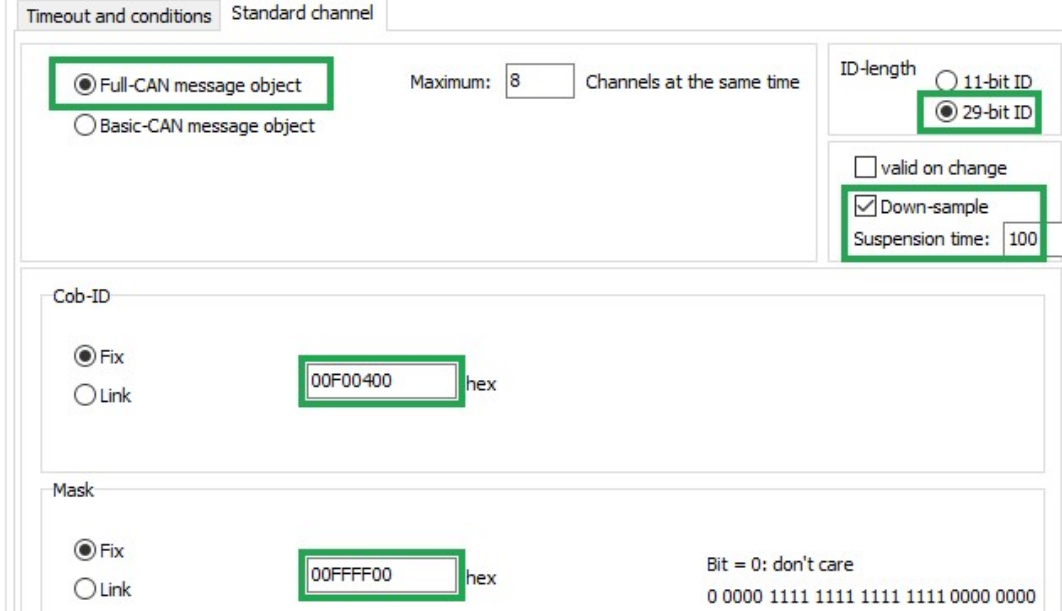
| Description | Selection | Function |
|---|---|---|
| FULL CAN MESSAGE OBJECT | Set | Assigns the receive message to a controller channel. |
| ID-LENGTH | 29-bit ID | ID length of the CAN message to be received. |
| DOWN-SAMPLE | Set | Receive message max. every 100 ms. |
| COB-ID | Fix (00F00400) |
Fixed identifier of the receive message (J1939_PGN_61444). |
| MASK | Fix (00FFFF00) |
Determines that bits 8 ... 24 of the identifier fixed in COB-ID must not vary in the identifier of the received message. In the J1939 protocol, the first bits of the identifier define the priority and the last bits of the identifier define the source address. These are ignored when the message is received. |
LOG ALL DATA BYTES EVERY 60 SECONDS¶
In this example, all data bytes are simply logged cyclically every 60 seconds. There are no additional conditions, and the data bytes are not checked.
LOGGING - CONDITIONS¶
Define the following settings for the PGN 61444 object.
Select the LOGGING tab.
Select the CONDITIONS tab.
Make the following settings.
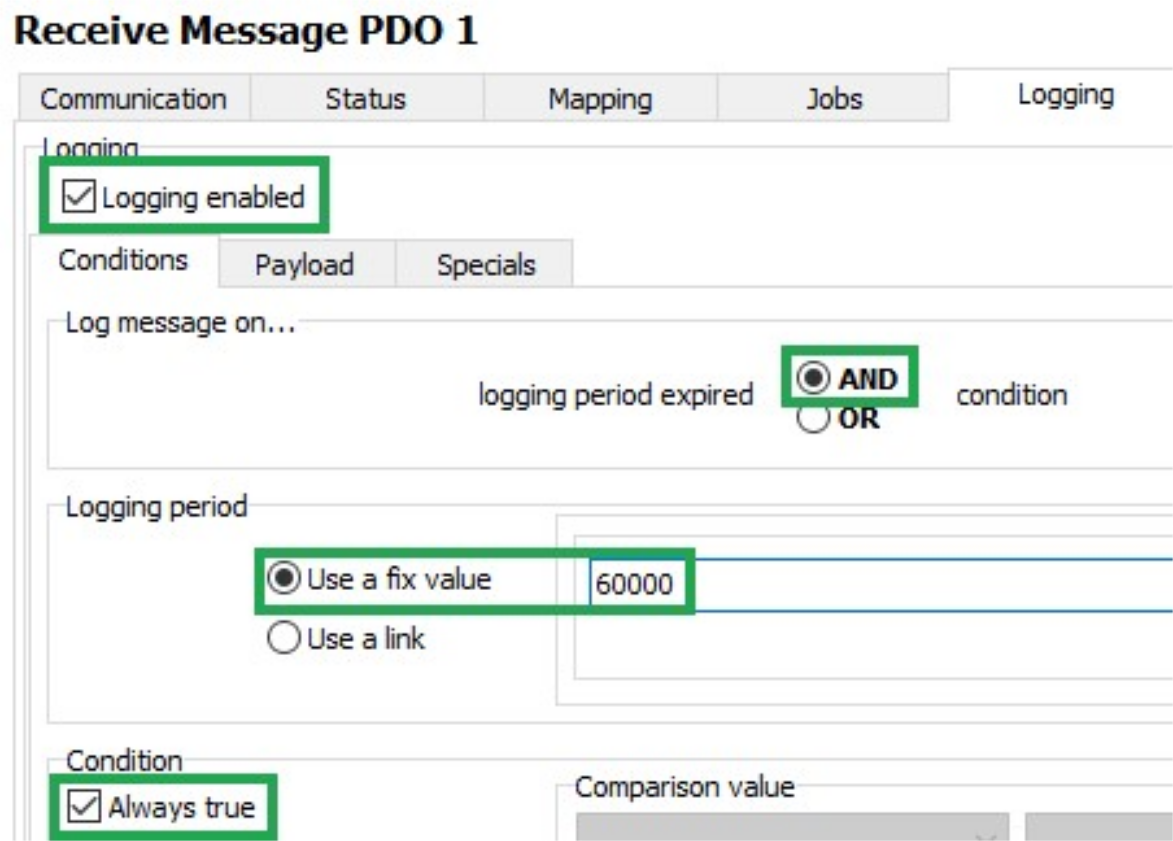
| Description | Selection | Function |
|---|---|---|
| LOGGING ENABLED | Set | Logging enabled |
| LOG MESSAGE ON | AND | The data is only logged when timeout is reached AND the condition is met. |
| LOGGING PERIOD | Use a fixed value (60000) |
Duration of the logging interval in milliseconds. |
| CONDITION / ALWAYS TRUE | Set | Logging takes place without prior checking of conditions. |
Payload¶
Select the PAYLOAD tab.
Make the following settings.
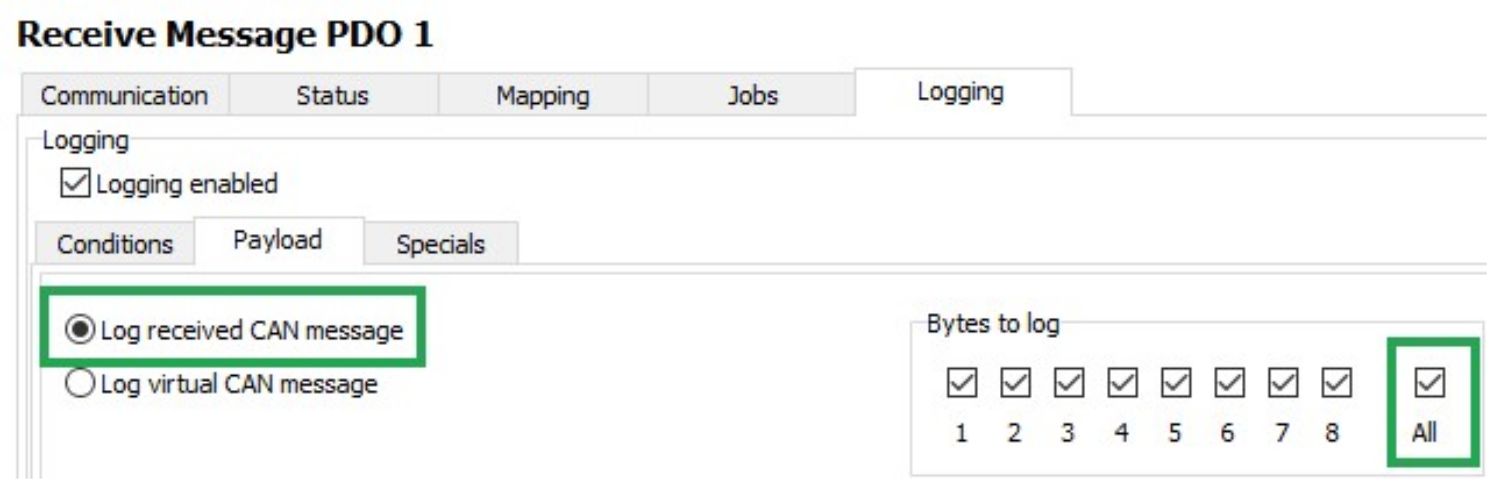
| Description | Selection | Function |
|---|---|---|
| LOG RECEIVED CAN MESSAGE | Set | Log data of the receive CAN message. |
| BYTES TO LOG | All | Log all data bytes. |
Click on the SAVE button.
Load the configuration to the device. See Loading the Configuration to the Device via CAN Interface.
✓ You have completed the configuration for logging of all data bytes of the J1939 PGN 61444 every 60 seconds.
CAN logging Example 2 -- Logging specific data bytes under certain conditions¶
In this example, specific data bytes are logged under defined conditions.
Data bytes 2 ... 5 and 8 of the CAN messages received are logged when the engine speed (data_bytes_4_and_5) changes by ± 500 rpm, or every 10 minutes.
A received CAN message is processed with the following functions:
-
Mapping
-
Jobs
-
Logging
VARIABLES¶
If you want to log data under defined conditions, you need certain variables for checking values.
These variables belong to the INTERFACE VARIABLES object dictionary group.
Create the INTERFACE VARIABLES object dictionary group.
In the INTERFACE VARIABLES object dictionary group, create four new INTERFACE VARIABLE objects.
✓ The LIST OF INTERFACE VARIABLES window opens.
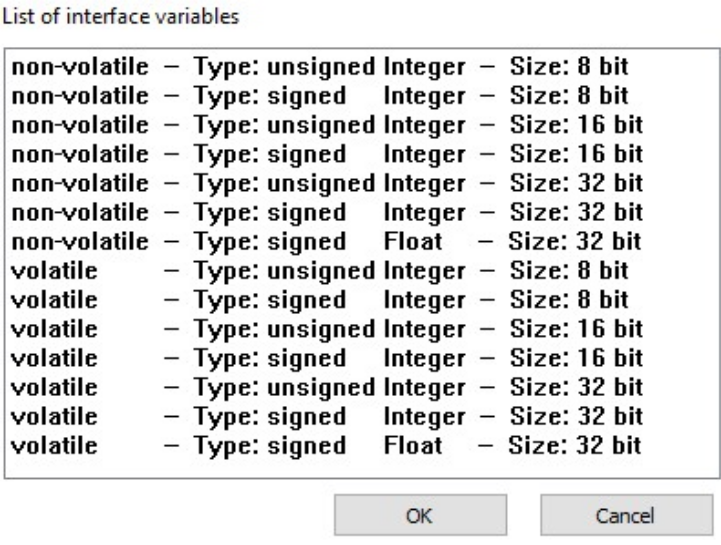
Select the first INTERFACE VARIABLE object according to the following table.
| Designation | Type | Sign | Size |
|---|---|---|---|
| volatile U8 Trigger | volatile | unsigned | 8 bits |
| volatile S32 Engine Speed new | volatile | signed | 32 bits |
| volatile S32 Engine Speed old | volatile | signed | 32 bits |
| non-volatile U16 threshold value | non-volatile | unsigned | 16 bits |
Click on the OK button.
✓ The INTERFACE VARIABLE object with the selected settings is created.
Repeat this procedure for the other three INTERFACE VARIABLE objects.
Rename the four INTERFACE VARIABLE objects according to the table.
Define a threshold value for the NON-VOLATILE U16 THRESHOLD VALUE object.
✓ The four INTERFACE VARIABLE objects are displayed
LOGGING - CONDITIONS¶
Define the following settings for the PGN 61444 object.
Select the LOGGING tab.
Select the CONDITIONS tab.
Make the following settings.
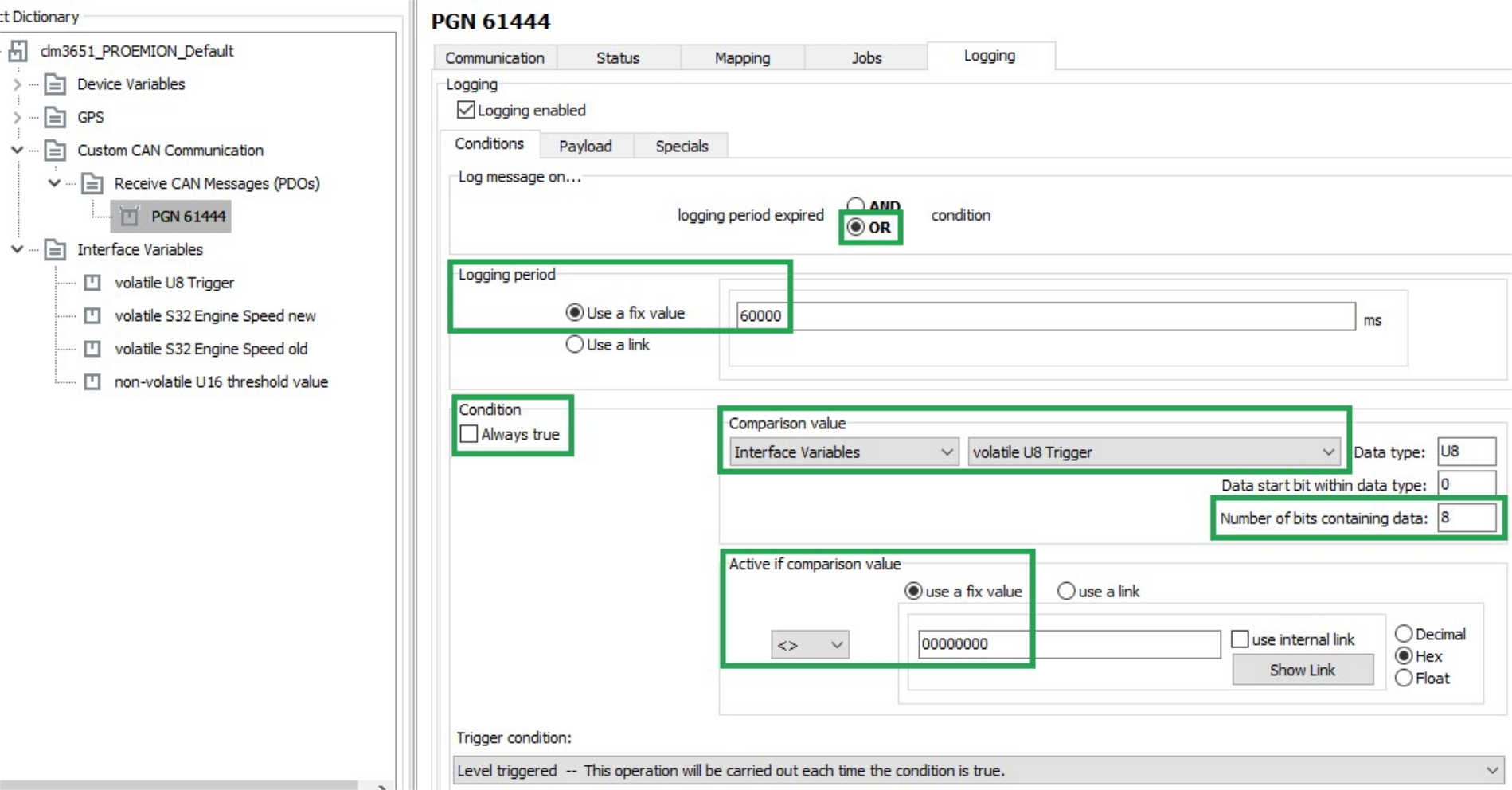
| Description | Selection | Function |
|---|---|---|
| LOG MESSAGE ON | OR |
The data is logged when timeout is reached OR the condition is met. |
| LOGGING PERIOD | Use a fixed value (600000) |
Duration of the logging interval in milliseconds. |
| CONDITION / ALWAYS TRUE | not set | The data is logged depending on the result of the check. |
| COMPARISON VALUE | volatile U8 Trigger |
Logging depends on the VOLATILE U8 TRIGGER variable. |
| NUMBER OF BITS CONTAINING DATA | 08 |
All 8 bits of the variable are compared with COMPARISON VALUE. |
| ACTIVE IF COMPARISON VALUE | <>0 |
Data is only logged if the variable VOLATILE U8 TRIGGER is not equal to 0. |
| TRIGGER CONDITION | Level triggered - This operation will be carried out each time the condition is true. | Logging is enabled as long as the variable VOLATILE U8 TRIGGER is not equal to 0. |
PAYLOAD¶
Select the PAYLOAD tab.
Define the following settings.
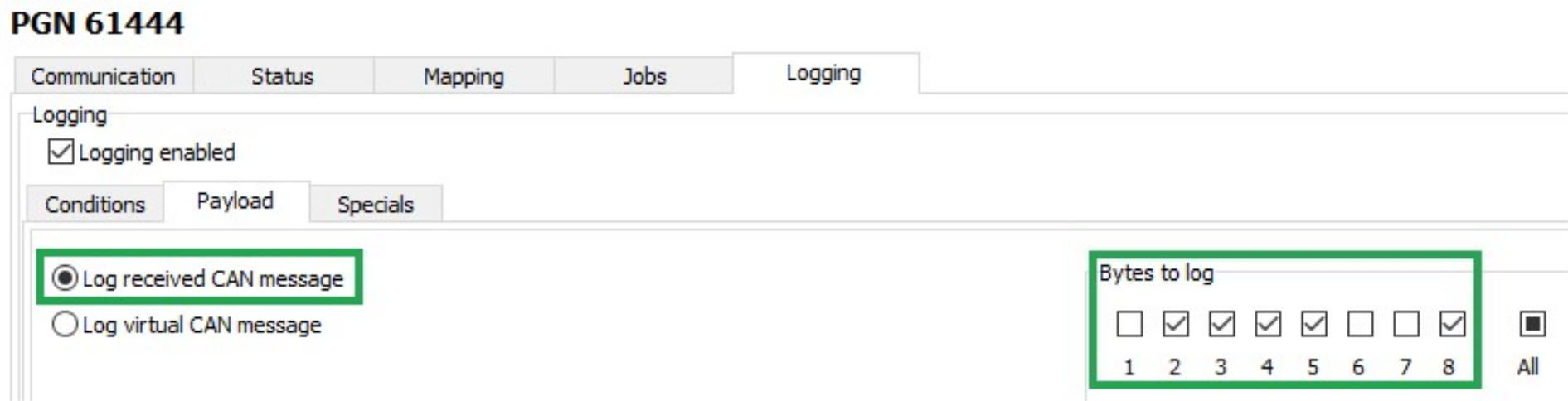
| Description | Selection | Function |
|---|---|---|
| LOG RECEIVED CAN MESSAGE | Set | Log data of the receive CAN message. |
| BYTES TO LOG | 2 ... 5 and 8 | Logging selected data bytes |
MAPPING - ACTIVE CONDITION¶
During mapping, data is copied from the CAN message to variables. You can then process the copied data in the device and perform calculations.
Select the MAPPING tab.
Select the ACTIVE CONDITION tab.
Define the following settings.
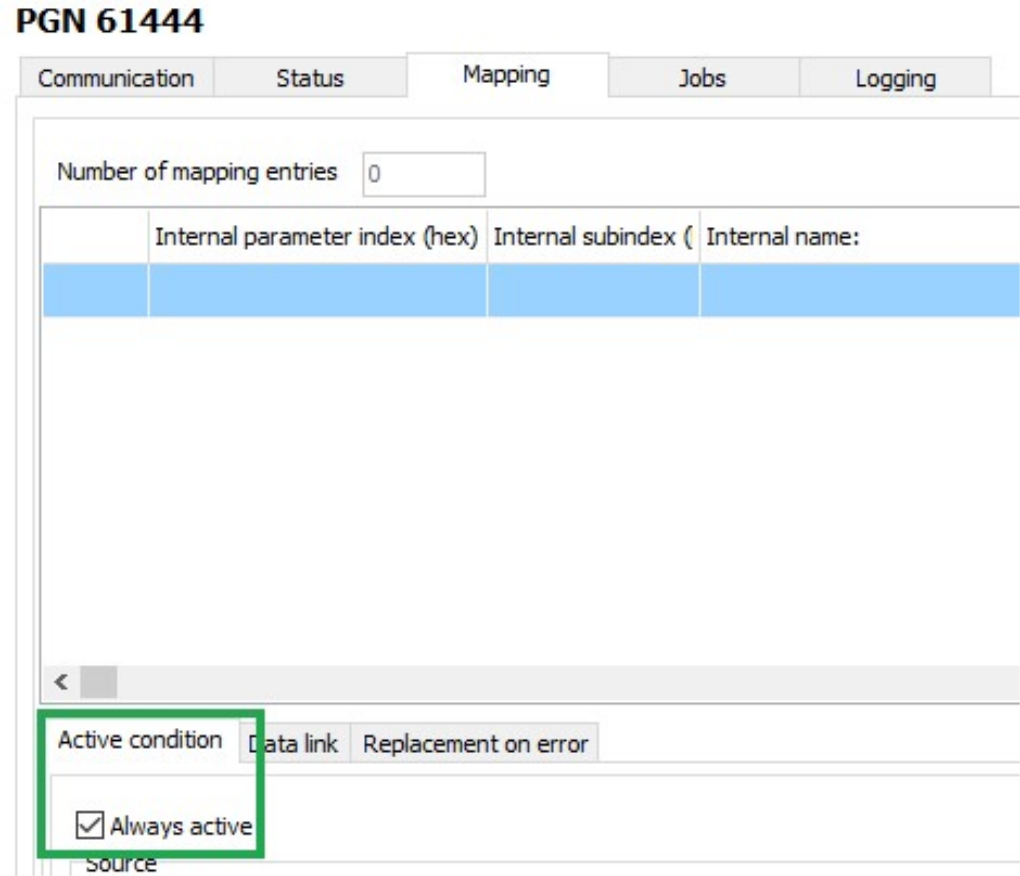
| Description | Selection | Function |
|---|---|---|
| ALWAYS ACTIVE | Set | Mapping always takes place without conditions. |
DATA LINK¶
Select the DATA LINK tab.
Define the following settings.
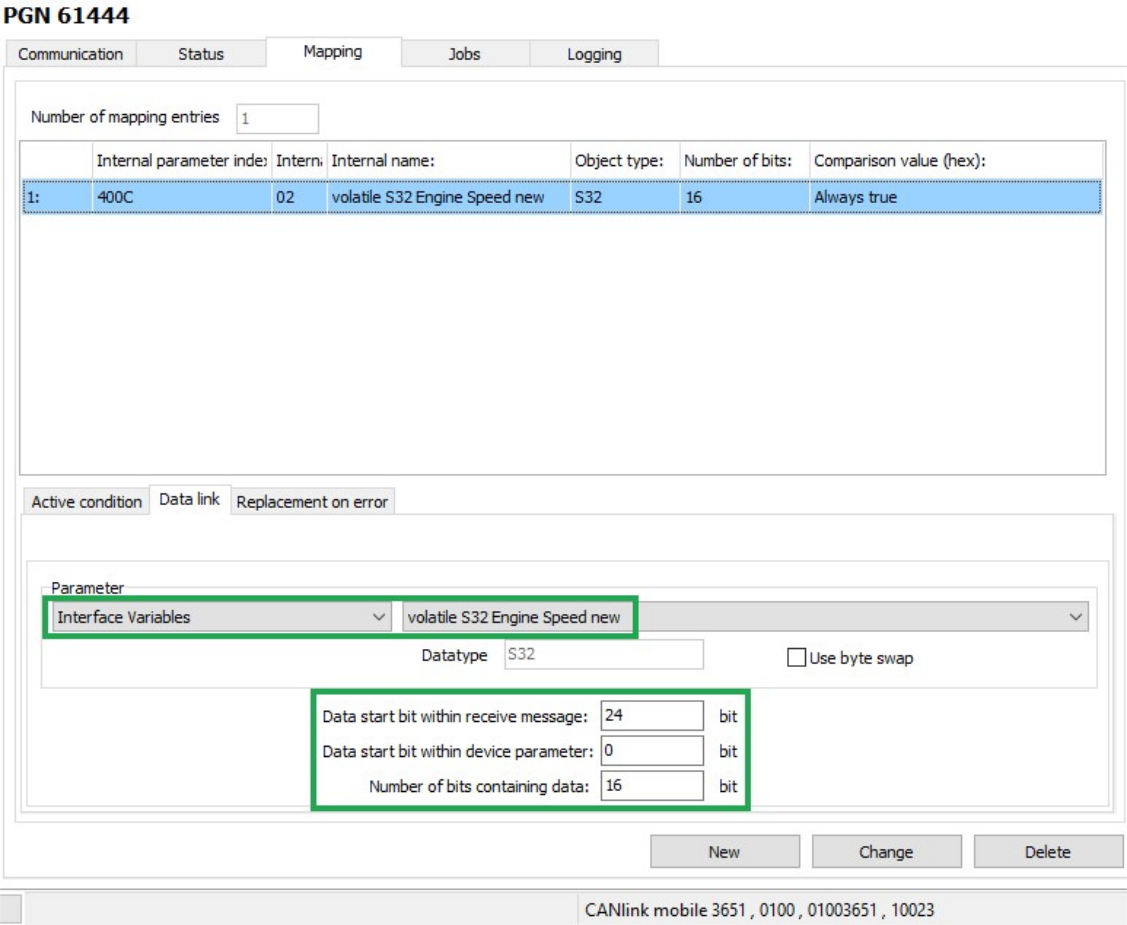
| Description | Selection | Function |
|---|---|---|
| PARAMETER | volatile S32 Engine Speed new | The data is written to the VOLATILE S32 ENGINE SPEED NEW variable. |
| DATA START BIT WITHIN RECEIVE MESSAGE | 24 bits | The data used starts with bit 24 (from_the_4th_byte). |
| DATA START BIT WITHIN DEVICE PARAMETER | 0 bits | The data used begins from bit 0 |
| NUMBER OF BITS CONTAINING DATA | 16 bits | The data used has 16 bits (2_bytes). |
Click on the NEW button to create the mapping entry.
✓ The mapping entry is adopted in the table.
✓ The data is copied into the internal variable on reception of a CAN message.
JOBS¶
Every time a CAN message is received, jobs are performed after mapping and before logging.
In the JOBS tab, configure the calculation operations you need for your job.
For the example configuration, you need two jobs with the function CALCULATE PARAMETER VALUE FUNCTION. With this function, you perform calculation operations and overwrite interface variables with calculated values.
JOB 1¶
With the first job, you check whether the current speed is above or below the threshold value. If one of these two cases applies, the VOLATILE U8 TRIGGER variable should be set to the value 1. This triggers logging of the CAN message.
| Variable | Type | Name/value |
|---|---|---|
| A | S32 | volatile S32 Engine Speed new |
| B | S32 | volatile S32 Engine Speed old |
| C | U16 | non-volatile U16 threshold value |
| D | S32 | volatile S32 Engine Speed new |
| E | S32 | volatile S32 Engine Speed old |
| F | U16 | non-volatile U16 threshold value |
The buttons for entering the calculation operations have the following functions:
| Buttons | Description |
|---|---|
 |
C = Clear: Deletes the entire calculation operation |
CE = Clear Entry: Only deletes the last symbol entered |
|
 |
Add variables to the calculation operation.Click on the button to open a window. Assign fixed values, interface variables or device variables to the variables. After you have defined a variable, the display on the button switches to the next variable. The selected variables are listed under LIST OF OPERANDS, including their values and types. |
 |
Basic calculation types (addition, subtraction, multiplication, division) |
   |
NOTE: Before applying these operations any input value is cast to unsigned integer type! |
and = arithmetic (bitwise) AND operation. |
|
or = arithmetic (bitwise) OR operation. |
|
xor = arithmetic (bitwise) XOR operation. |
|
| On integer numbers, the operation is performed bitwise. If the operators only contain the values 0 or 1, the operation can be considered a logical calculation. | |
not = logical NOT operation. |
|
| If the operand is 0, the expression evaluates to 1. If the operand is unequal to 0, the expression evaluates to 0. | |
| WARNING: Do not apply these operators on floating-point numbers! | |
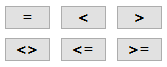 |
Comparative value (equal_to, less_than, greater_than, not_equal_to, less_or_equal_to, and_greater_or_equal_to). The expression evaluates to 1 when the comparison is true. The expression evaluates to 0 when the comparison is not false. |
 |
Brackets |
Note
The calculation formulas are evaluated from left to right. Mathematical priority rules are not observed!
Define the priority calculations in the formula using brackets
JOB 2¶
In the second job, you replace the value of the VOLATILE S32 ENGINE SPEED OLD variable with the value of the VOLATILE S32 ENGINE SPEED NEW variable as soon as the VOLATILE U8 TRIGGER variable has the value 1. This updates the speed from which the deviation should be detected.
This updates the speed from which the deviation should be detected.
-
Select the JOBS tab.
-
In the CURRENT FUNCTION OF SELECTED JOB list, select the function CALCULATE PARAMETER VALUE FUNCTION.
-
In the RESULT list, select the trigger VOLATILE S32 ENGINE SPEED OLD.
-
Using the buttons in the MATHEMATICS AND LOGIC section, enter the calculation operations
((A <>_B) * C) + ((D # E) * F). -
Click on button A.
!!! note If you click on a placeholder (e.g. A), the window INPUT OPERAND INFORMATION OR OPEN A NEW OPERATION opens. You can find the allocation of the variables for this example in the table below.
-
Click on the variable in the list that you want to allocate the placeholder to.
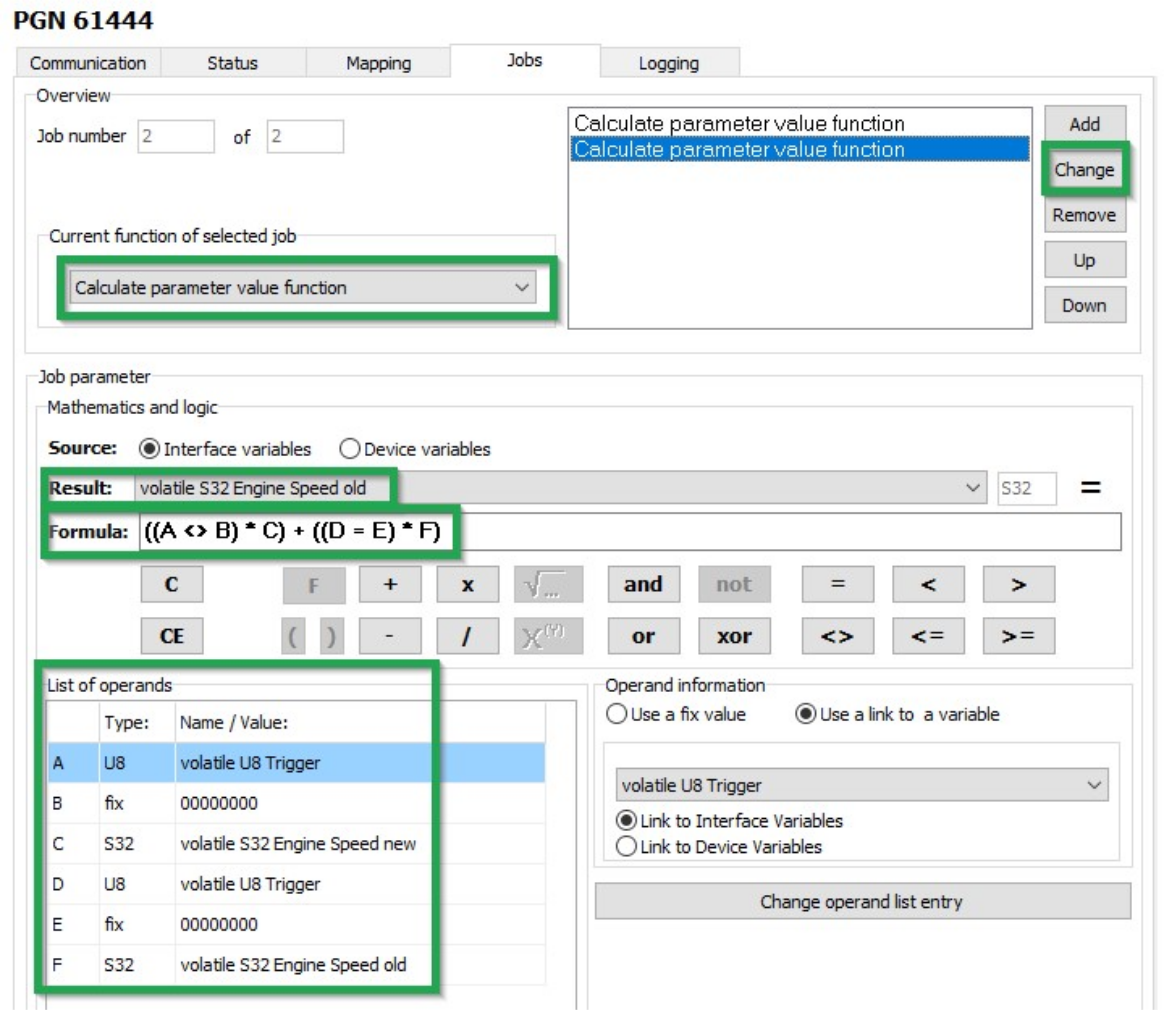
-
Allocate the following variables to the placeholders:
Variable Type Name/value A U8 volatile U8 Trigger B fix 00000000C S32 volatile S32 Engine Speed new D U8 volatile U8 Trigger E fix 00000000F S32 volatile S32 Engine Speed old : Variables - Job 2 -
Click on the NEW button when you have entered the calculation operations completely.
-
Click on FILE > SAVE in the menu.
-
Load the configuration to the device. See Chapter Loading the configuration to the device.
✓ You have completed the configuration for logging specific data bytes.
CAN logging Example 3 - On Change Logging¶
On receipt of CAN messages whose content seldom changes, you can activate the VALID ON CHANGE option.
If the option is activated, a CAN message received is only recorded by the device if a value within the data bytes has changed.
This option can be activated for standard 11-bit and 29-bit CAN messages as well as for J1939 CAN messages.
High data volume
If the VALID ON CHANGE option is activated, the DOWN-SAMPLE option is automatically deactivated and no longer limits the frequency of recording. Each CAN message received with a modified content will be recorded by the device. This leads to high data volumes in the case of CAN messages whose content changes in the millisecond range.
- Only activate the VALID ON CHANGE option for carefully selected messages.
-
Navigate to the COMMUNICATION section.
-
Move to the STANDARD CHANNEL section and click to enable the VALID ON CHANGE option.
-
Navigate to the LOGGING section.
-
Move to the LOGGING section and click to tick the LOGGING ENABLED option.

✓ CAN messages received with a modified content are recorded.
Logging GNSS position data¶
The GNSS position data contains information on longitude and latitude, altitude and direction as well as speed, time and date.
Data is only logged when valid position data is received.
Define the following settings:
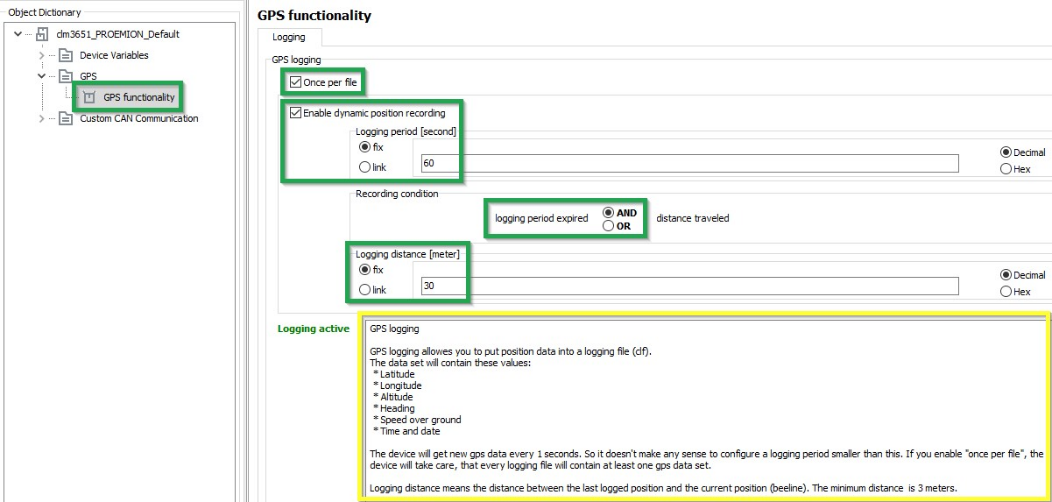
| Variable | Function |
|---|---|
| ONCE PER FILE | Each logfile contains position data at least once. |
| ENABLE DYNAMIC POSITION RECORDING | Enables/ Disables the position data logging. |
| LOGGING PERIOD (SEC) | Time period during which the position data should be logged. |
| AND / OR | AND: Position data is logged if both conditions (time_and_distance) are met. |
OR: Position data is logged if one of the conditions (time_or_distance) is met. |
|
| LOGGING DISTANCE (METERS) | Distance between the last position logged and the current position (linear_distance). |
Oversampling due to too-frequent logging of GNSS position data.
High data consumption or high number of write cycles into the internal memory.
At the following settings, the position data is logged every 100 ms: Logging period = 0 Logging distance = 0 These settings generate a high data consumption. If there is no Cellular connection, the position data is written to the device’s internal memory instead. This considerably reduces the service life of the internal memory.
- Under Variable Logging period, enter a value >= 1 second because the device only receives new GNSS data every 1 second.
- Under Variable Logging distance, enter a value above the GNSS accuracy
Configuring the logging of internal variables¶
You can log various internal variables. Internal variables can be both device variables and interface variables.
To log internal variables, you need an ACTION - FUNCTION - OPERATION object in the OPERATION MANAGER object dictionary group. With the object ACTION - FUNCTION - OPERATION, up to 8 internal variables can be logged in one process as a virtual CAN message.
Note
Virtual CAN messages have been extended to log up to 32 variables. Read the note in Creating Object Dictionary Groups and Objects for more information.
-
Start the Proemion Configurator software.
-
Choose FILE > OPEN from the menu.
-
Open the desired configuration file.
-
Create an OPERATION MANAGER object dictionary group.
-
Create an ACTION - FUNCTION - OPERATION 1 object in the OPERATION MANAGER object dictionary group.
-
Select the BASIC tab.
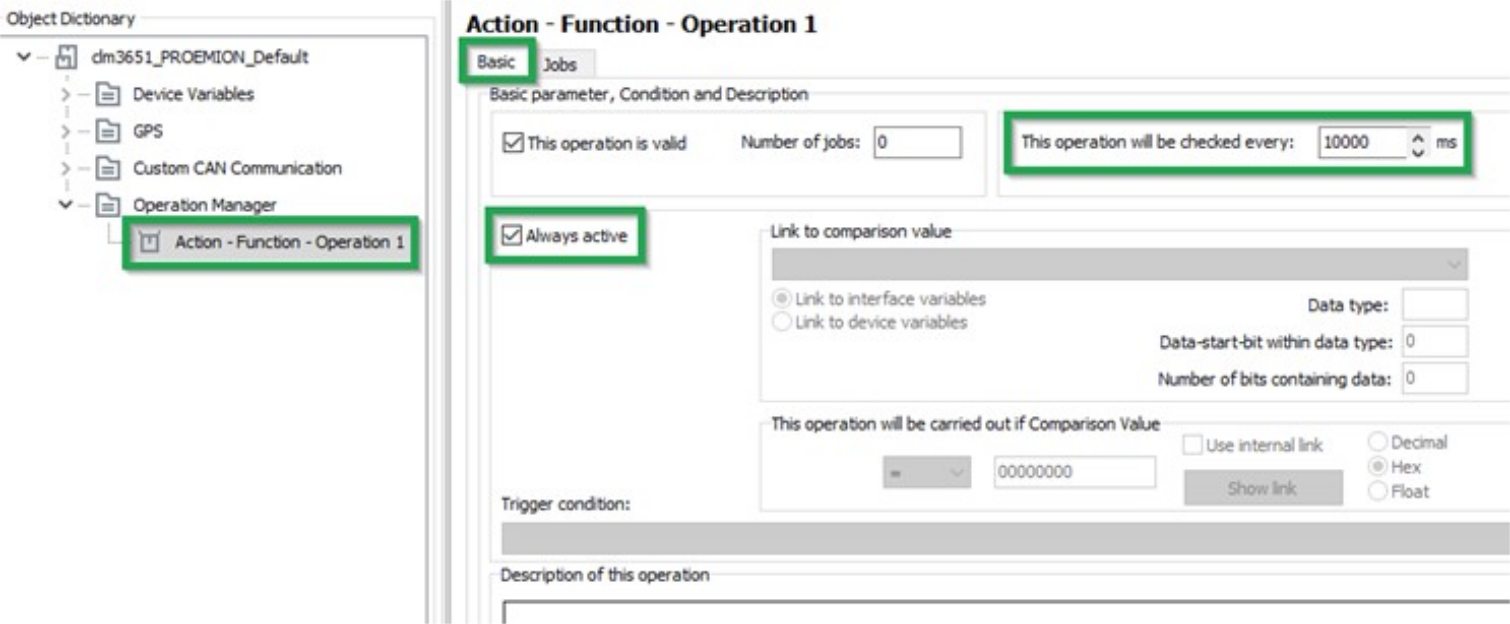
-
Enter a value in milliseconds in the THIS OPERATION WILL BE CHECKED EVERY field. This value determines the intervals at which the variables are logged.
-
Check the ALWAYS ACTIVE box. Logging takes place irrespective of conditions. Alternatively, you can define conditions for logging.
-
Click on the SAVE button.
-
Select the JOBS tab.

-
In the OVERVIEW field, click on the ADD button.
✓ The CREATE NEW JOB window opens.
-
Select the LOGGING job type.
-
Click on the OK button.
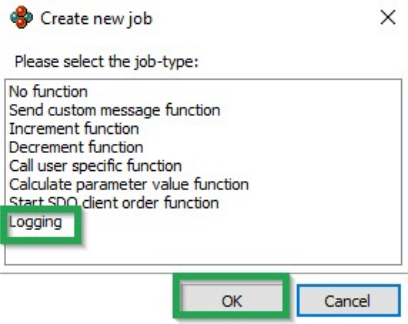
-
In the COBID field, enter the ID (hex) for the virtual CAN message. The ID must not be used by other CAN messages.
-
In the ADD NEW ROW field, select the variable type and the variable.
-
In the JOB PARAMETER field, click on the ADD button.
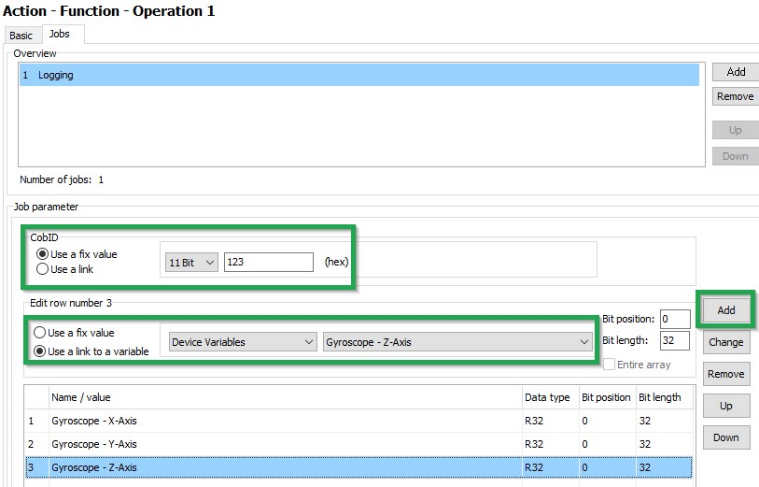
-
Add further variables if required.
-
Click on FILE > SAVE in the menu.
✓ You have completed the configuration for logging of internal variables.
Evaluating the data logged on the DataPlatform¶
WRITING A PARSING CONFIGURATION FILE (PDC) AND ASSIGNING IT TO A MACHINE
In order to be able to evaluate the logged messages and display the signals on the DataPlatform, you must create an additional configuration file (PDC file) and assign it to the device on the DataPlatform.
Note
A detailed description on how to create a PDC file, can be found at the PDC Manual.
J1939 DM1 logging¶
In the following, it is described how to configure the DM1 logging in the Proemion Configurator.
It is possible to configure the logging of more than one source address. For a detailed description of J1939 DM1, read J1939 DM1 DM2.
Open the .DOD file in the Proemion Configurator and select the desired "Receive Message (PDO)" within the Object Dictionary on the left hand-side. For the following example, the source address 0x003 is used.
In the Communication tab, proceed as follows:
-
Change CAN protocol to "J1939".
-
Fill in the PGN with "FECA".
-
Source Address is in this example "03".
-
Source Address Value is selected with "Fix".
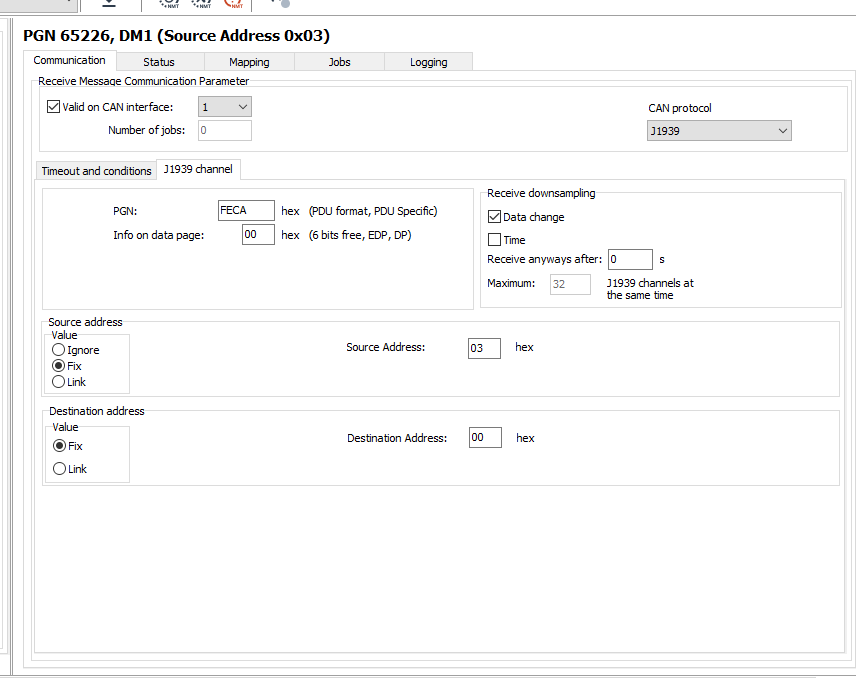
Figure 1: Communication tab - Example Source Address 0x03
In the Logging tab, proceed as follows:
-
Activate the check box Logging enabled.
-
Select the AND condition for logging period expired.
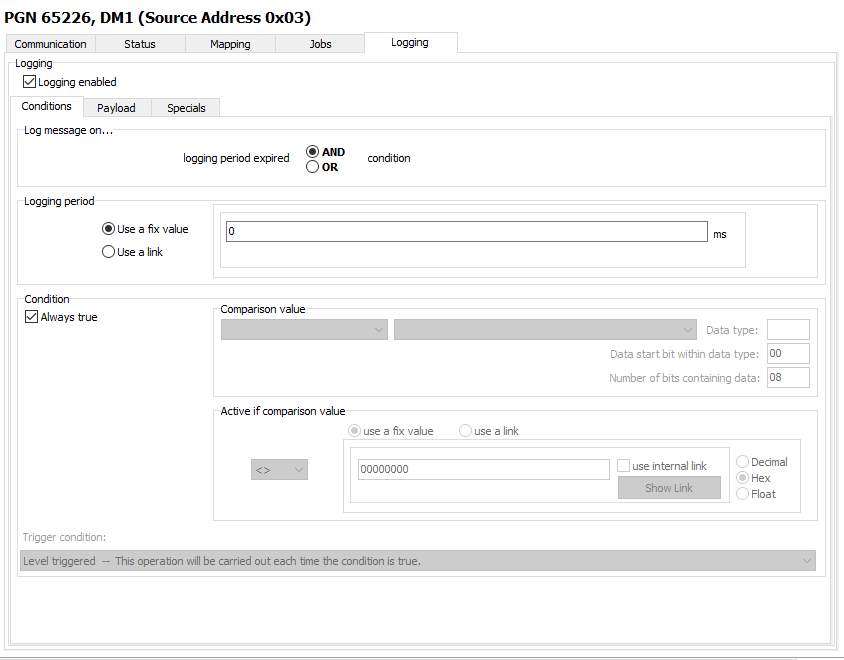
Figure 2: Logging tab
File Transfer¶
You can use the device to transfer files between the DataPlatform and the machine's CAN open network.
Transfer User File via the DataPlatform¶
Performing controller updates without being physically on-site is an increasingly important application for many OEMs. This chapter describes how a user file can be transferred from the Proemion DataPlatform via internet and cellular network to a CANlink® mobile and from there to an ECU via CAN Bus.
A common use case for this function could be a parameter update of the ECU.
The update file is loaded remotely into the CANlink® mobile and stored within the internal filesystem.
An external device can then download the file by using SDO commands on the CAN bus. The CANlink® mobile only acts as a gateway with an integrated CANopen file server.
Please be aware that the transferred files are not checked or controlled in any way by the CANlink® mobile itself.
So, the files must be checked and processed by the target device (ECU).
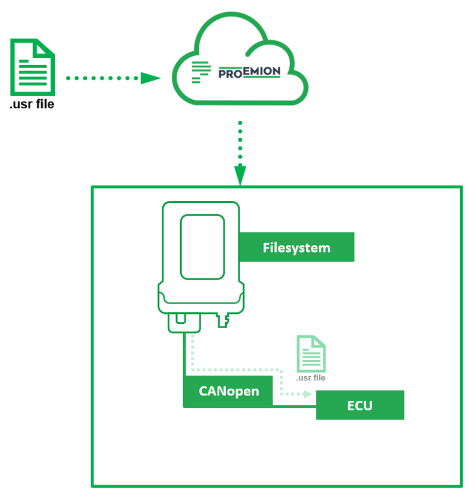
Required file properties
As the files are neither handled or checked by the Proemion DataPlatform nor by the CANlink® mobile, any file format and file content can be transferred. But independent of the user file format and content, the files must adhere to the following rules:
- The file name must consist of eight letters or digits.
- The file extension must be
*.usr. - The file size must be a maximum of 50 MB.
Example of a valid file name: Update01.usr
Upload the File from the DataPlatform to the CANlink® mobile¶
- Please make sure that your DataPortal user has the permission set
machine–adminassigned. - Login to your Proemion DataPortal Account.
- Go to > Administration > Transfers (1).
- Click on UPLOAD FILE (2).
- Select the desired machine (3).
- Select the desired
*.usrfile for upload (4). - Click on UPLOAD (5).
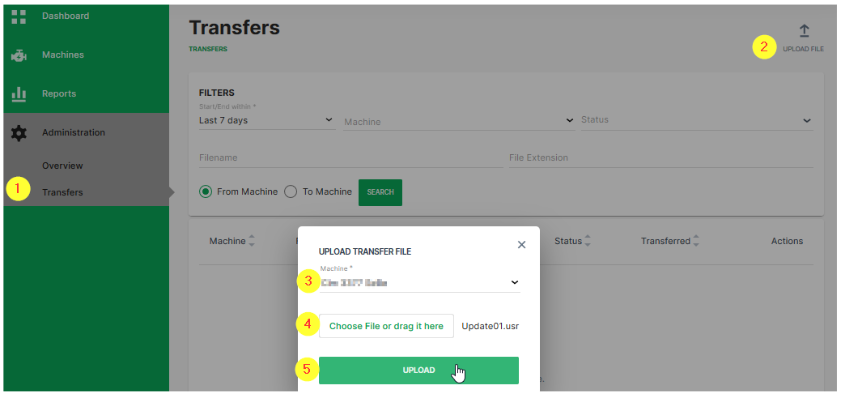
✓ The uploaded file will appear in the file transfer list after successful upload.
✓ The DataPlatform manages the file transfer to the selected machine (CANlink® mobile) automatically as soon as the device is ready to receive the file.
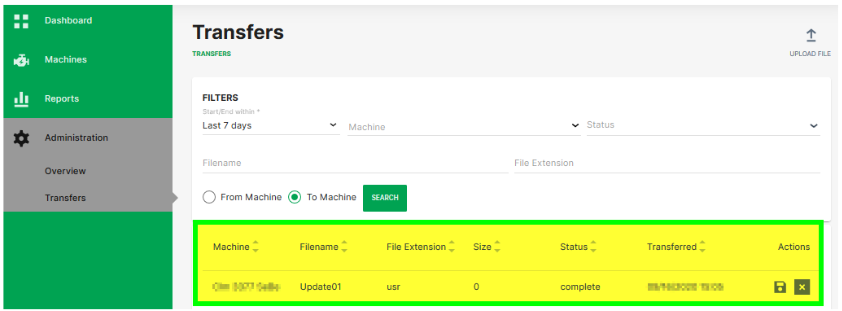
Note
In case that a file transfer directly via the REST API is required, please refer to the instructions at the DataPlatform API docs REST API.
Transfer the file from the CANlink® mobile to the ECU via CAN¶
The CANlink® mobile has an internal file system that can be accessed by CANopen SDO commands. The protocol for the file handling communication on CAN Bus is CANopen. SDO requests and the SDO block transfer protocol are used to exchange commands and payload.
Note
Further information on file transfer can be found in CANopen File Server.
- As indication that a new file had been received by the CANlink® mobile, the device variable with object index
0x5402subindex0x01is automatically set to0x01. Herewith any ECU on the CAN network can poll the status of this device variable to monitor the reception of new files. - In the next step the ECU must check the name of the available files which were uploaded to the CANlink® mobile. This is done by writing the command string
lsinto device variable with object index0x4444subindex0x01. - Check the status of this command. Read out the device variable with object index
0x4444subindex0x03. The status should be3(=LIST). - Read out the content of device variable with object index
0x4444subindex0x02. This will give you the exact file name. - The download of the specific file to the ECU can be triggered by writing the command string
rd “[file_name]”into device variable with object index0x4444subindex0x01. - Check the status of this command. Read out the device variable with object index
0x4444subindex0x03. The status should be2(=READ). - To download the file content, read out the domain of device variable with object index
0x4444subindex0x02. - Once the downloaded file has been processed successfully at the ECU, it should be deleted in the CANlink® mobile by writing the command string
del “[file_name]”into the device variable with object index0x4444subindex0x01. - To enable the download of a new file, the device variable with object index
0x5402, Sub Index0x01must be set to0x00.
Note
The maximum file size is limited by the built-in flash memory of the CANlink® mobile.
It must be ensured that there is minimum of 8 Mbyte of free memory available for logging and other internal device processes.
The free memory is to be checked by reading out the device variable with object index 0x4444 subindex 0x04.
Generic File Transfer¶
Transferring a File to the DataPlatform¶
A simple transfer of files up to 128k Byte via the CAN bus to the DataPlatform is implemented in the device. The files are saved in the device in an internal nonvolatile memory and automatically transferred to the DataPlatform when a server link is established.
The following steps are required for the transfer:
-
An external device transfers a file using the CANopen SDO protocol to the object index
0x5421subindex0x03of the CANlink® mobile: DEVICE VARIABLES > FILE TRANSFER TRANSMIT - FILE DATA - CACHED MODE -
An external device transfers the file name using the CANopen SDO protocol to the object index
0x5420subindex0x03of the CANlink® mobile as a string in the format 8.3 (see File Transfer Restrictions: DEVICE VARIABLES > FILE TRANSFER TRANSMIT - FILENAME - CACHED MODE -
An external device writes the value 1 to the object index
0x5422subindex0x03of the CANlink® mobile which triggers automatic file transfer to the DataPlatform: DEVICE VARIABLES > FILE TRANSFER TRANSMIT - COMMAND - CACHED MODE
You can find out the current free memory space available using the object index 0x5423 subindex 0x04 (DEVICE VARIABLES > FILE TRANSFER TRANSMIT - GET FREE SPACE - CACHED MODE). If memory space is available, several files can be logged in the device. The files are then automatically transmitted to the DataPlatform in the order in which they were written to the device.
For detailed information on creating objects, see Creating Object Dictionary Groups and Objects.
Reading a File Transferred by the DataPlatform¶
The DataPlatform can transfer files in segments of 1024 bytes each via the device. Files larger than 1024 bytes are transferred in segments the receiving ECU needs to concatenate again.
Note
This applies to all files except files with the ending .usr.
.usr files are received completely and only provided to the ECU after complete reception.
For more information, read Transfer User File via the DataPlatform.
The files transferred by the DataPlatform are saved to the device in an internal volatile memory and can be read out of the device via the CANopen protocol.
Proceed as follows to be able to read out files transferred from the DataPlatform.
1) Check object for file (segment).
- For all files except
.usr, check that the object index0x5402:0x00has a value <>0.
This value indicates that a file segment has been received by the device from DataPlatform and is available. Other values are:
0x00: no file segment available0x01: file segment available0x81: last file segment available
Object name: FILE TRANSFER RECEIVE - INDICATION
Note
The object index 0x5403 subindex 0x00 contains the total number of segments for the current file.
Object name: FILE TRANSFER RECEIVE - NUMBER OF FILE ELEMENTS
The object index 0x5404 subindex 0x00 contains the number of the currently received file segment.
Object name: FILE TRANSFER RECEIVE - ACTUAL FILE ELEMENT
2) Read file name.
If the object index 0x5402 subindex 0x00 indicates a file segment is available, you can read the file name from the object index 0x5400 subindex 0x00.
Object name: FILE TRANSFER RECEIVE - FILENAME
3) Read off file.
Read off the file from the object index 0x5401 subindex 0x00.
Object name: FILE TRANSFER RECEIVE - FILE
4) Write object.
When the file has been read out, write the value 0x00 to the object index 0x5402 subindex 0x00.
Object name: FILE TRANSFER RECEIVE - INDICATION
5) Receive next files.
- In order to receive the next file segment after a file segment was received, in the object index
0x54020subindex0x00the value0x01must be set to0. - In order to receive the next file after a file was received completely, in the object index
0x54020subindex0x00the value0x81must be set to0.
✓ The device is then ready to receive a new file segment from the DataPlatform.
For detailed information on creating objects, see Creating Object Dictionary Groups and Objects.
File Transfer Restrictions¶
Restrictions apply to file transfer. The following conditions must be met:
-
The file names must have 8 characters and the file extension must have 3 characters (8.3 format).
-
Characters permitted for the file name and file extension are :
"A", ... "Z","a", ... "z"and"0", ... "9" -
The following file extensions are reserved for internal use only and may not be used for customer application:
.obr,.obw,.obc,.dbs,.prg,.bin,.clf,.msg
If these conditions are not met, the file will be rejected by the device and/or DataPlatform. This blocks transmission in both directions. To clear the blockage, you must delete the faulty file from the DataPlatform or from the file transfer.
Further information on how to delete faulty files from the DataPlatform can be found here: File Transfer
CANopen File Server¶
The CANlink mobile offers a local nonvolatile file storage that can be accessed by CANopen SDO. This functionality for example is used for providing ECU update files to the machine received from the DataPlatform. Please also refer to Transfer User File via the DataPlatform.
The following functions are available for data access via the SDO:
| Function Code | Option | Description |
|---|---|---|
wr |
["]path name ["] |
Write in file (always_in_Append_mode) |
del |
["]path name["] |
Delete file or directory |
rd |
["]path name["] [-o n] [-l m] |
Read out of file |
ls |
List file or directory | |
cd |
[["]path["]] [..] [] |
Change directory |
The following functions are available following data access via CANopen:
| Index | Subindex | Meaning | Data Type | Description |
|---|---|---|---|---|
0x4444 |
0x01 |
Command | String |
See function descriptions. Please be aware that the maximum accessible file path size is 253 characters. |
0x4444 |
0x02 |
Data | Domain |
See function descriptions |
0x4444 |
0x03 |
Status | U16 |
The following states are displayed: 0 = OK / IDLE 1 = WRITE 2 = READ 3 = LIST 65535= ERROR |
0x4444 |
0x04 |
Available size | U32 |
Memory space available on file system in bytes |
0x4444 |
0x05 |
File size | U32 |
Size of current file selected, in bytes |
0x5402 |
0x01 |
Status | U16 |
The following states are displayed: 0 = *.usr-file not completely available 1 = *.usr-file completely available |
Note
The SDO client must wait until the file system status flag 0x4444 sub 0x03 reads 0x0000 - OK / IDLE after sending the delete file command before issuing any other SDO communication.
- The device may not respond to the SDO requests while it’s deleting the file and thus generate an SDO timeout also for reading the file system status flag.
- Do not issue any other SDO communication requests until the status reads OK / IDLE
Restrictions¶
Restrictions on the flash size and file storage using the file server.
Note
File or path names that contain a space must be placed in quotation marks.
Note
The available flash size for file storage is maximum of 110 MB.
Folder or file names should consist of the following characters:
letters(uppercase/lowercase)numbers␣(space)_(underscore)-(hyphen)
For file names, a dot . is also accepted. However, it is also possible to create file names without a dot ..
Note
If a given path name starts with \, the path is considered as starting in the root folder.
In case that the path name does not start with \, the path is considered as starting within the current folder.
Note
Please be aware the filename ls.txt is reserved for the automatically generated listing file.
Function Description¶
The following sections describe the individual functions and structure of the respective commands.
When entering commands, pay attention to the correct spelling and notation.
If spaces are contained, the path and file input must be set in quotation marks. If no spaces are contained, the use of quotation marks is optional.
WR - Write¶
- Structure of the command:
wr "path\name"
If the wr command is written to the command object, the device checks whether a file with this name exists. If no file is available, a new one is created.
An error code appears in the status object if the file cannot be opened to be written to or an error occurs.
The current file size is displayed in the file size object. The data content can then be written in the data object.
After completing the write operation to the data object, the file is automatically closed and the command deleted.
Directories can also be created with this command.
Note
The wr command always works in append mode.
To overwrite an existing file, delete all old files manually beforehand.
Note
For the wr command, the following rules must be considered:
- When only creating a folder, the command must always end with
\. - If no
\is provided, a file is created without an extension. - If no
\and no.is provided, a file is created without an extension
DEL - Delete¶
- Structure of the command:
del "path\name"
If the del command is written to the command object, the device checks for existing files with this name. If the file exists, it will be deleted.
An error code appears in the status object if the file cannot be deleted or an error occurs.
When the process is completed, the command is deleted.
Directories can also be deleted in this way.
RD - Read File¶
- Structure of the command:
rd "path\name" [-o n] [-l m]
If the rd command is written to the command object, the device checks for existing files with this name.
An error code appears in the status object if the file does not exist or an error occurs.
The file size object displays the size of the current file. The data content can be read out of the data object.
After completing the read operation from the Data object, the file is automatically closed, and the command deleted.
The following options are available with this command:
-
-o n- Offset: n bytes The read process starts at the byte-position specified. Decimal or hexadecimal values are possible. -
-l m- Length: m bytes The number of bytes specified (maximum_till_the_end_of_the_file) is read out of the file. Decimal or hexadecimal values are possible. To specify hexadecimal value use the prefix0x, for example0xA.
Note
When using the rd command, it must be ensured that the order of the arguments is kept as shown in the example: rd "path\name" [-o n] [-l m].
LS - List file or directory¶
- Structure of the command:
ls
If the ls command is written to the command object, a file and directory list can be read out of the data object.
Directory names are identified by < and >. A line feed [CRLF] occurs after each entry.
When the read operation from the Data object is completed, the command is deleted.
The result of the ls command looks like this example:
Content of USER:
< . >
< .. >
ls.txt
< folder_name >
usrfile1.usr
usrfile2.usr
usrfile3.usr
CD - Change Directory¶
- Structure of the command:
cd ["path"], [..], []
If the cd command is written to the command object, the device checks whether a directory with this name exists. If a directory with this name exists, it is opened.
An error code appears in the status object if the directory does not exist or an error occurs.
When the process is completed, the command is deleted.
The following options are available with this command:
-
"path"- Change to the directory specified. -
..- Change to the directory level one level higher. -
\- Change to the root directory.
Encrypted Data Transfer¶
The device supports encrypted data transfer to the DataPlatform in accordance with the TLS standard (Transport Layer Security).
TLS encryption is enabled by default upon delivery. No user intervention is required to activate encryption. After a device reset to factory settings, encrypted data transfer is enabled by default.
Note
Using data encryption is considered a cybersecurity best practice. Proemion strongly recommends keeping encryption enabled at all times. The option to disable encryption is removed in firmware releases newer than version 4.0.0. Previously unencrypted communication mode is deprecated and no longer supported in new releases.
Technical Details¶
The variables required belong to the DEVICE VARIABLES object dictionary group.
| Variable | Function |
|---|---|
| ENABLE ENCRYPTED DATA TRANSFER | 1 = enable encrypted data transfer |
| REMOTE SERVER PORT | 61200 = port for encrypted data transfer |
Starting from firmware releases newer than version 4.0.0, TLS encryption is mandatory.
The ENABLE ENCRYPTED DATA TRANSFER variable can only be set to 1 (enable TLS); any attempt to set it to 0 is invalid.
Devices that previously used port 60200 for unencrypted communication will automatically switch to port 61200 during the firmware update.
TLS encryption will also be automatically enabled during the update process, ensuring that encrypted data transfer is active by default.
Note
Encrypted data transmission may be prohibited in some countries. Please observe local regulations on encrypted data transfer.
Geolocation Features¶
The CANlink® mobile 3600 provides two primary methods for tracking machine movements and operational areas: GeoLeash and GeoFence. Both functions allow monitoring of machine relocation, but they differ in configuration effort and specific use cases.
The following documentation explains how to configure and use the GeoFence and GeoLeash functions, describes the related variables, and provides guidance on using these functions.
GeoFence Mode¶
The device is provided with a geofence monitoring function. This allows you to monitor whether the device is located inside or outside a pre-defined “fenced” area and when the device crosses the fence.
There are three ways to define the fence:
- Define center and radius of a circle. The center of the circle is defined as a fixed point.
- Define center and radius of a circle. The current position on enabling the function is used as the center of the circle.
- Two opposite points are defined for a rectangle. The variables belong to the DEVICE VARIABLES > INTERNAL GEOFENCE object dictionary group.
| Variable | Function |
|---|---|
| GEOFENCE - MODE | 0 = Geofence disabled 1 = GeoFence enabled, circle center and radius defined 2 = GeoFence enabled, circle center, current position, and defined radius 3 = GeoFence enabled, rectangle 4 = GeoLeash enabled, location monitoring, COORDINATE 2 > LONGITUDE / RADIUS variable is a condition. |
| GEOFENCE - COORDINATE 1 > LONGITUDE | Longitude for center of the circle or first corner of the rectangle |
| GEOFENCE - COORDINATE 1 > LATITUDE | Latitude for center of the circle or first corner of the rectangle |
| GEOFENCE - COORDINATE 2 > LONGITUDE / RADIUS | GeoFence Mode Circle: Radius of the circle GeoLeash Mode: Line length (unit: meters)GeoFence Mode Rectangle: Degree of longitude of second corner (Unit: Decimal degree, -180 ... 180) |
| GEOFENCE - COORDINATE 2 > LATITUDE | Latitude for the second corner of the rectangle |
GeoFence Status¶
The GeoFence status can be used to trigger an event internally. The GeoFence status is updated every 2 seconds. Every time the GeoFence status changes, the time is written to a variable.
The variables belong to the object dictionary group DEVICE VARIABLES.
| Variable | Function |
|---|---|
| GEOFENCE STATUS | 0x00 = device is outside the fence 0x01 = device is inside the fence 0xFF = status unknown (e.g. because no position data is available) |
| GEOFENCE - STATUS CHANGE UTC TIME | Time of GeoFence status change |
For detailed information on creating objects, see Creating Object Dictionary Groups and Objects.
GeoLeash¶
The GeoLeash function enables you to monitor and display the location of the machine.
In this case, the location offset is determined by an adjustable limit value. The minimum limit value for the tolerated location offset is 100 meters.
The DataPortal can be used to activate the GeoLeash function and define the area to be monitored.
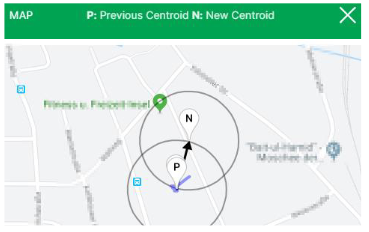
Note
The GeoLeash and device internal Geofence functions cannot be used simultaneously.
Please be aware that the GeoLeash function must be supported by the installed firmware. In case of problems, update to the latest firmware.
Further information on the GeoLeash function is available in the DataPortal, see Widget Catalog > GeoLeash.
Important device variables¶
This chapter provides information on important device variables that control the device functions.
Positioning¶
The device is equipped with a GNSS receiver. The GNSS receiver can process signals from the following satellite navigation systems:
-
GPS
-
GLONASS
-
BEIDOU
Note
As of firmware release 4.0.0 GNSS functionality is automatically disabled in certain countries to meet cybersecurity requirements under the Radio Equipment Directive (RED). This measure ensures compliance with local type approval regulations and legal restrictions on location services. {{ tools_radio_approvals_clm3600 }} for a full list of countries where CANlink® mobile 3600 devices have a radio approval.
Set the combination of the satellite systems in the POSITIONING > MODE (GNSS) variable. The POSITIONING > MODE (GNSS) variable belongs to the DEVICE VARIABLES > POSITIONING object dictionary group.
| Variable | Function |
|---|---|
| POSITIONING - MODE (GNSS) | 0 = GPS only 1 = GPS + GLONASS 2 = GPS + BEIDOU 3 = GLONASS + BEIDOU |
| Variable | Function |
|---|---|
| POSITIONING -- ANTENNA STATUS | Status of the antenna |
| POSITIONING - POSITIONING DATA VALID | Status of the position system. Indicates whether valid position data is available |
| POSITIONING - ACTIVE SATELLITES | Number of satellites used |
| POSITIONING - LONGITUDE | Longitude |
| POSITIONING - LATITUDE | Latitude |
| POSITIONING - ALTITUDE | Altitude of the antenna above sea level |
| POSITIONING - SPEED OVER GROUND | Speed over ground |
| POSITIONING - GPS ODOMETER | GPS-based measurement of kilometers traveled |
| POSITIONING - HEADING | Direction in relation to North |
Wi-Fi® and Bluetooth¶
Some types of the device are equipped with a radio module for Wi-Fi® and Bluetooth. The DEVICE VARIABLES > LOCAL WIRELESS object dictionary group contains the following variables:
| Variable | Function |
|---|---|
| WLAN - ENABLE | Enable and disable the WLAN interface |
| BLUETOOTH - ENABLE | Enable and disable the Bluetooth interface |
| BLE - ENABLE | Enable and disable the BLE interface |
| WLAN - MAC ADDRESS | MAC address of the WLAN interface |
| BLUETOOTH - MAC ADDRESS | MAC address of the Bluetooth interface |
| BLE - DEVICENAME | BLE device name |
| WLAN/BLUETOOTH - FIRMWARE VERSION RADIO MODULE | Firmware version of the WLAN/Bluetooth module |
You can find more information on further device variables in the explanatory texts in the Proemion Configurator software.
Input/Output Functions and Sensors¶
Depending on the hardware variant, the device is equipped with input and output functions. See Technical Data for details.
You can measure voltages between 0 V and 15 V with the analog inputs.
The DEVICE VARIABLES > I/O, SENSORS, DIAGNOSIS object dictionary group contains the following variables:
| Variable | Function |
|---|---|
| OPERATION TIME TOTAL | Device operation time in seconds. |
| DEVICE TIME (UNIX_FORMAT) | Internal device time. The time is synchronized to UTC time by the GNSS satellites, NTP servers or the DataPlatform. |
| IO - DIGITAL OUTPUT | 0 = output off 1 = output on |
| IO - DIGITAL OUTPUT STATUS | 0 = output error 1 = output ok |
| IO - TERMINAL 30 VOLTAGE | Voltage on terminal 30 connector. |
| IO - TERMINAL 15 VOLTAGE | Voltage on terminal 15 connector. |
| IO - TERMINAL 15 (IGNITION) | 0 = input state low (<_2.3_V) 1 = input state high (>_6_V) |
| IO - DEVICE TEMPERATURE | Device internal temperature in °C |
| ANALOG INPUT 1 | Voltage on analog input 1 in Volts |
| ANALOG INPUT 2 | Voltage on analog input 2 in Volts |
| ANALOG INPUT 3 | Voltage on analog input 3 in Volts |
| ACCELERATION - X-AXIS | Acceleration on the X-axis (in_g) |
| ACCELERATION - Y-AXIS | Acceleration on the Y-axis (in_g) |
| ACCELERATION - Z-AXIS | Acceleration on the Z-axis (in_g) |
| GYROSCOPE - X-AXIS | Rate of rotation on the X-axis (in_°/s) |
| GYROSCOPE - Y-AXIS | Rate of rotation on the Y-axis (in_°/s) |
| GYROSCOPE - Z-AXIS | Rate of rotation on the Z-axis (in_°/s) |
The variables IO - DIGITAL OUTPUT, IO - ANALOG INPUT1, IO - ANALOG INPUT2, and IO - ANALOG INPUT 3 are available for the input/output functions. To enable and configure the input/output functions, you must create additional options.
-
Create the IO MODULE CONFIGURATION object dictionary group.
-
Click the right-hand mouse button on the IO MODULE CONFIGURATION object dictionary group.
-
In the context menu, click on NEW OBJECT DICTIONARY ENTRY > CHANNEL SETUP. ✓ You have created the objects ANALOG INPUT - CHANNEL 1, ANALOG INPUT - CHANNEL 2, ANALOG INPUT - CHANNEL 3 and DIGITAL OUTPUT - CHANNEL 4.
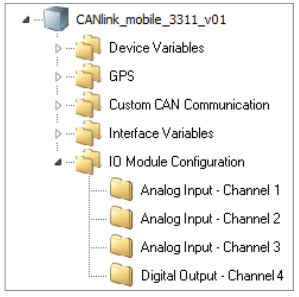
Figure 1: Input / Output Context Menu
Output Function¶
Define the settings for the output function under IO MODULE CONFIGURATION > DIGITAL OUTPUT - CHANNEL 4.
-
Select the object DIGITAL OUTPUT - CHANNEL 4.
-
In the CHANNEL CONFIGURATION list, select the configuration ON-OFF DIGITAL OUTPUT.
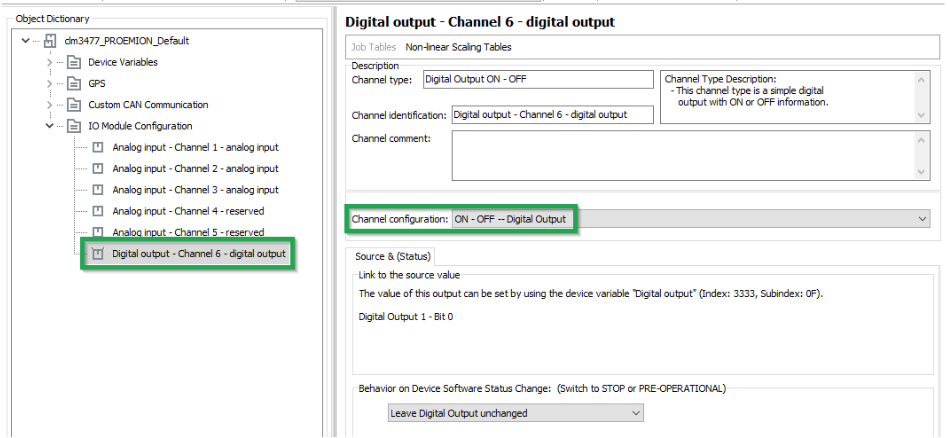
Figure 2: On - Off Digital Output
The following variables are available:
| Variable | Function |
|---|---|
| CHANNEL CONFIGURATION | Enable and disable the digital output. |
| BEHAVIOR ON DEVICE SOFTWARE STATUS CHANGE | Behavior on CANopen Mode STOP or PREOPERATIONAL. The output can retain its current value or be set to a defined value. |
Battery¶
Some types of the device are equipped with an integrated battery. The DEVICE VARIABLES > BATTERY object dictionary group contains the following variables:
| Variable | Function |
|---|---|
| BATTERY - CHARGE LEVEL | Current charge level (in_%) |
| BATTERY - VOLTAGE | Measured voltage (in_Volts) |
| BATTERY - CYCLE COUNT | Number of charge cycles so far |
| BATTERY - STATE OF HEALTH VALUE | Probable remaining capacity relative to nominal capacity (in %) |
| BATTERY - TIME TO EMPTY | Expected remaining time until full discharge (in Minutes) |
| BATTERY - FULL CHARGE CAPACITY | Probable capacity if fully charged (in mAh) |
| BATTERY - CURRENT | Current to or from the battery Value > 0: charging Value = 0: fully charged Value < 0: discharging |
| BATTERY - TEMPERATURE | Current temperature (in °C) |
| GO TO SLEEP VOLTAGE | Specifies the battery voltage threshold at which the device enters sleep mode. The value is defined in millivolts (e.g. 3500 = 3.5V, 3300 = 3.3V). |
Note
The GO TO SLEEP VOLTAGE device variable is not included in the default configuration and must be added manually if required.
Note
The integrated battery has a limited service life.
- Have the integrated battery replaced by our service department after 500 charging cycles. See Service and Support
Operation Time Counter¶
The device is equipped with an internal operation time counter.
The OPERATION TIME TOTAL object belongs to the DEVICE VARIABLES > I/O, SENSORS, DIAGNOSIS object dictionary group.
The operation time counter cannot be reset. The operation time counter runs as soon as the device is in Standard mode (not Sleep mode).
For detailed information on creating objects, see Creating Object Dictionary Groups and Objects.
Power Management¶
To protect the device from damage and data loss, a correct wiring and configuration of the power management settings is mandatory. The main purpose of the power management settings is that the device has a safe shutdown before the supply voltage (terminal 30/31) is disconnected.
The required variables belong to the DEVICE VARIABLES > POWER MANAGEMENT object dictionary group. For detailed information on creating objects, see Creating Object Dictionary Groups and Objects.
The following subsections provide an overview of the individual power management functions.
Note
Wake up of the device is possible when at least one of following condition is fulfilled:
- The IO - Clamp 15 (Ignition) State is at level
high(> 6 V) - A CAN message is present at the CAN 1 or CAN 3 interface
- The Power Management - Acceleration Sensor Wake-up Force is enabled and the configured threshold is exceeded
- The Power Management - Cyclic Wake-up Time is enabled and the configured time is elapsed
Power Management - Shutdown Delay Time¶
The Power Management - Shutdown Delay Time is required for the terminal 15 monitoring. After recognizing ignition input (terminal 15) and CAN off-state, the device will continue operating for the specified time and then go to sleep mode.
Note
The terminal 15 monitoring is only active if the value for the shutdown delay time is > 0
Note
Make sure that there are no CAN messages present on the CAN bus anymore before the Shutdown Delay Time is elapsed. Otherwise, the device would either not switch to sleep mode or immediately wake up.
You can enable the Power Management - Shutdown Delay Time as follows:
- Ensure that terminal 15 voltage from the machine is connected to the terminal 15 (input ignition signal) pin at the CANlink mobile device. See Switching the Device On/Off.
- Open the latest device configuration with the Proemion Configurator software.
- Add the device variable Power Management – Shutdown Delay Time to your configuration.
-
Write the desired time in seconds into the parameter value input field.
Note
The configured shutdown delay time should not be too short. It must be ensured that there is enough time for the device to finish its internal jobs, complete the latest clf file and transmit the file to the DataPlatform.
-
Save the updated configuration file with a new Device Configuration Version String.
- Write the updated configuration to the device.
- Perform a reset of the device.
- Check if the new power management settings are applied correctly.
Power Management - CAN sleep Time¶
The Power Management - CAN sleep Time is to be used when the device should be automatically set to sleep mode in case that there is none of the configured CAN messages received by the device within a specified time period.
Note
To set the device to sleep mode by the device variable Power Management - CAN sleep Time, the IO - Terminal 15 (Ignition) State must be low.
You can enable the Power Management - CAN sleep Time as follows:
- Open the latest device configuration with the Proemion Configurator software
- Add the device variable Power Management - CAN sleep Time to your configuration
- Write the desired time in milliseconds into the parameter value input field.
- Save the updated configuration file with a new Device Configuration Version String.
- Write the updated configuration to the device.
- Perform a reset of the device.
- Check if the new power management settings are applied correctly.
Power Management - Time to Sleep¶
The Power Management – Time to Sleep is used when the device needs to be set to sleep mode by a connected controller with additional power management logic functionality.
Note
Power Management - Time to Sleep is a volatile device variable and therefore considered as a one-time function.
Note
The device will only enter sleep mode when the terminal 15 is at level low and no configured CAN message is left on the connected CAN bus.
Note
While the countdown timer for Power Management – Time to Sleep is active, there is no reception and transmission of CAN messages possible
You can trigger the Time to Sleep by the controller as follows:
- Ensure that the terminal 15 is at level low
- Ensure that configured CAN message are not present on the connected CAN bus.
-
Write the desired count down time in seconds via your controller and a CANopen SDO message to Object Index
0x3333, SubIndex0x08,UInt8.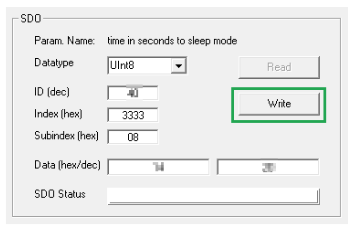
Figure 1: CANopen SDO -
Check that the device is set to sleep mode after the specified time is elapsed.
Power Management - Acceleration Sensor Wake-up Force¶
When the internal accelerometer detects an acceleration force higher than the configured value, the device automatically wakes up from sleep mode.
You can enable the Acceleration Sensor Wake-up Force as follows:
- Open the latest device configuration with the Proemion Configurator software.
- Add the device variable Power Management - Acceleration Sensor Wake-up Force to your configuration.
-
Write the acceleration force into the parameter value input field.
Note
The recommended threshold for the acceleration force is at least
1.2 g. Otherwise the device might get into a kind of restart cycle. -
Save the updated configuration file with a new Device Configuration Version String.
- Write the updated configuration to the device.
- Perform a reset of the device.
- Check if the new power management settings are applied correctly.
Power Management - Cyclic Wake-up Time¶
When in sleep mode, the device will wake up from sleep mode automatically after the configured time period.
You can enable the Power Management - Cyclic Wake-up Time as follows:
- Open the latest device configuration with the Proemion Configurator software.
- Add the device variable Power Management - Cyclic Wake-up Time to your configuration
-
Write the desired time for the cyclic wake-up in seconds into the parameter value input field.
Note
The minimum possible value for the cyclic wake-up time is
120 seconds. Lower values should not be used. -
Save the updated configuration file with a new Device Configuration Version String.
- Write the updated configuration to the device.
- Perform a reset of the device
- Check if the new power management settings are applied correctly.
Power Management - Deep Sleep Flag¶
The use of Power Management - Deep Sleep Flag is especially recommended for devices with internal battery and additional wake up flags configured. This function was implemented to avoid that the device wakes up during storage time and transport and hence the battery gets discharged.
Note
With deep sleep mode enabled, the device will ignore the configured wakeup flags such as cyclic wake up or acceleration force.
Note
Power Management - Deep Sleep Flag is a volatile device variable and therefore considered as a one-time function.
Wake up of the device is possible when at least one of the following condition is fulfilled:
- Rising edge on IO - Terminal30 Voltage.
- The IO - Terminal 15(Ignition) State is at level
high(> 6 V) - A CAN message is present at the CAN1 or CAN 3 interface
You can set the device into deep sleep mode before transport as follows:
- Open the latest device configuration with the Proemion Configurator software.
- Add the device variable Power Management – Deep Sleep Flag to your configuration.
- Write the value 0x01 into the parameter value input field of the device variable Power Management – Deep SleepFlag to enable the deep sleep mode
- Add the device variable Power Management – Time to Sleep to your configuration.
- Define a value for the countdown time in seconds to sleep mode in the parameter value input field.
- Ensure that there are no CAN messages left on the CAN bus.
- Ensure that the terminal 15 is at level low.
- Write the updated configuration to the device.
- Wait for the specified time until the device is set to deep sleep mode.
- Verify that the device does not wake up by the configured wake-up flags such as acceleration force or cyclic wake-up time.
Protocols and Connections¶
The chapter Technical Data > Protocols contains an overview of the available protocols and connections.
For further information on protocols and connections, refer to the Download Center.
Safe Remote Updates Guideline¶
Introduction¶
Our firmware is subjected to an intensive testing process, including automated tests during development and dedicated testing for each final release candidate. This test suite is continuously expanded based on internal findings and field reports.
Despite these efforts, a residual risk of unexpected issues in specific scenarios remains.
To minimize this risk, we strongly recommend following the procedure outlined in this guideline when performing a remote firmware or configuration update campaign.
By adhering to these steps, you can significantly increase the safety and success rate of your update process.
Risk of Property Damage
It is strongly recommended not to remotely update all machines in a single step with a new configuration or firmware.
Remote Update Procedure¶
When planning a firmware or configuration roll-out, several steps should be considered to ensure the process is as safe and reliable as possible.
This guideline applies to each individual machine type or machine family. A machine family is defined by devices sharing the same configuration version, the same initial firmware, and — if applicable — the same SIM card settings.
Following these steps helps minimize the risk of update-related errors.
1. Initial Test on a Simulator or Sample Machine¶
Perform the first remote update on a simulator device whenever possible.
If a simulator is unavailable, use a single, easily accessible sample machine.
Verify that the update succeeds and that the device behaves as expected.
2. Update a Small Batch (Up to 10 Machines)¶
In the second step, extend the update to a maximum of 10 machines.
After completion, verify the success of the update on each machine individually.
3. Update a Partial Roll-out (Up to 15% of the Fleet)¶
If the second step is successful, proceed with a partial roll-out to a maximum of 15% of the fleet.
Conduct a success check after this roll-out as well.
4. Update the Remaining Fleet¶
Once all prior steps have been validated, roll out the update to the rest of the fleet.
Verifying Update Success¶
Between each roll-out step, perform sample checks to ensure that devices are operating as expected. Verification should include:
- Device startup and shutdown behavior in the machine environment
- Logged operational data
- File transfer to your ECU
- Execution of configured actions
- Any special or device-specific behaviors configured in your system
Configuration Update¶
You can use the Proemion Configurator to load a configuration update on the device. The configuration update can be loaded to the device via the CAN interface or the DataPlatform. The device identifies and automatically loads the new configuration. For more detailed information on how to create a device configuration, see Customizing the demo configuration File.
Note
Changes with an write-access to any object that changes the device configuration, will put the device automatically into pre-operational mode.
This happens to prevent incorrect behavior due to incomplete configuration.
Each write-access to all sub-objects of 0x1011 (Restore_Default_Parameters) - which also covers the deletion of logged files - also switches the CANopen status to pre-operational. Most of the device's modules do not work in this state.
It is recommended to perform a reboot after changing configuration so that all modules are reinitialized.
DataPlatform¶
Authorization to perform a configuration update must be enabled on the DataPlatform. Generally, users with administrator rights have this authorization.
-
Start the Proemion Configurator software.
-
Open the corresponding configuration file (
*.DOD). -
Click on TARGET DEVICE > OBJECT DICTIONARY > DOWNLOAD > REMOTE DOWNLOAD - ALL ENTRIES or click on the arrow in the toolbar next to the DOWNLOAD ALL ENTRIES symbol.
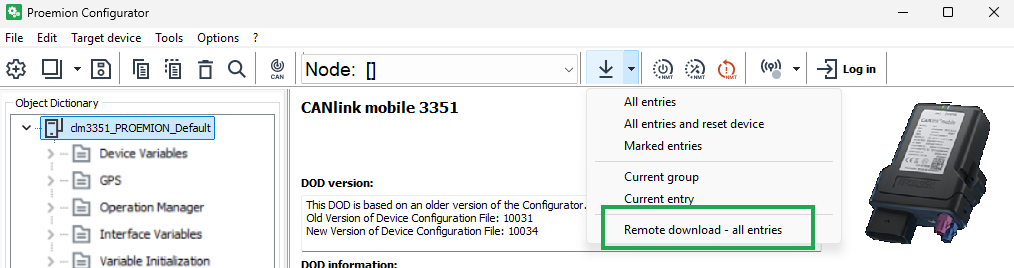
Figure 1: Configuration Update ✓ The REMOTE CONFIGURATION DOWNLOAD TO TARGET(S) window opens.
-
Click on the SELECT DEVICES button in the window REMOTE CONFIGURATION DOWNLOAD TO TARGET(S) window.
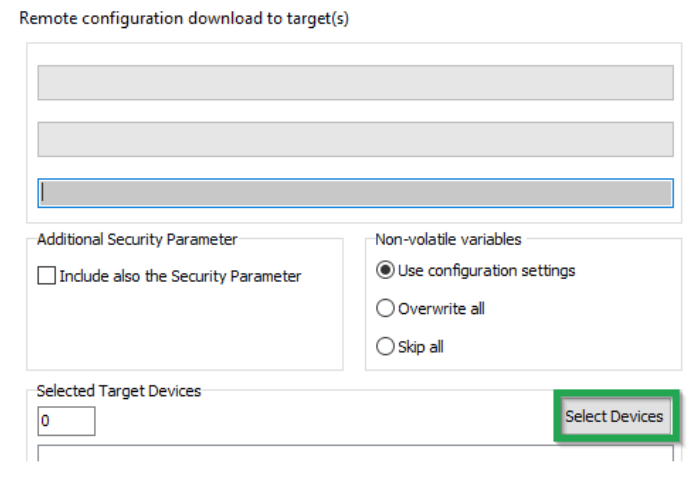
Figure 2: Configuration Update - Targets ✓ The SELECT DEVICES window opens.
-
Enter your DataPlatform user credentials in the SELECT DEVICES window.
-
Click on the LOGIN button.
-
Select the device.
-
Click on the OK button.

Figure 3: Configuration Update - Select Devices Loss of connection due to incorrect parameters.
The online connection may be lost due to incorrect provider parameters. In most cases, it is not necessary to update the security variables, so this should be avoided.
- Before every update of the security variables, check the provider parameters.
- Refer to Safe Remote Updates Guideline and follow the recommended update process.
-
Click on the START button in the REMOTE CONFIGURATION DOWNLOAD TO TARGET(S) window.
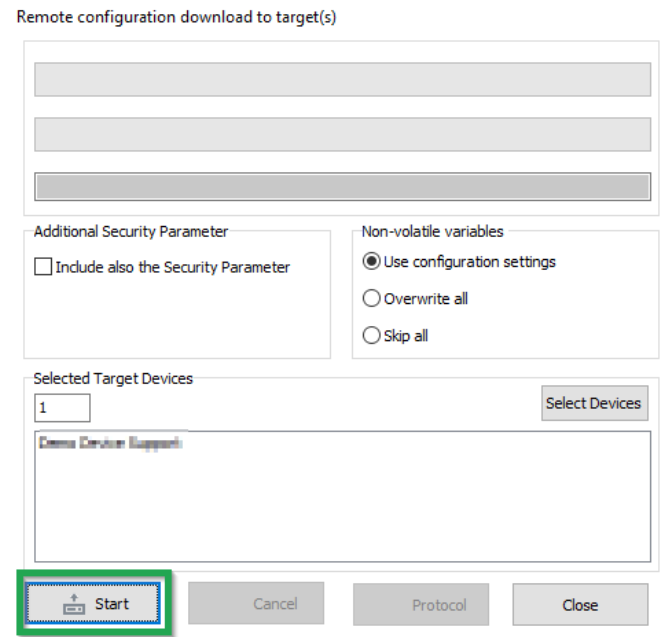
Figure 4: Configuration Update - Download to Target The following warning appears. The user is warned against downloading untested configuration files.
Figure 5: Configuration Update - Download Warning -
Click on the YES button.
The configuration update download starts automatically as soon as the device is online. The download can take several minutes. The device recognizes the configuration file and saves it to its internal memory. The device LEDs light up in a certain sequence.Note
For more information on the LED status indications, see Indicator Elements.
-
Check the DOD version and the DOD activation time in the Communication unit details display of the DataPortal.
The new Config Version with Timestamp will be displayed in the Communication unit details after the next connection of the device. An update log will appear in the file download section of the DataPlatform.
Example of an UpdteLog.txt after a successful configuration update
<LogFileVersion>: 1.0
<BEGIN>: 1607604003
<actSW>: Fw 7.3.0
<actBL>: Bl 9.2
<actDOD>: Proemion
File Size: 20763
Received configuration file
CONFIGURATION DOWNLOAD COMPLETE AFTER 1 ATTEMPT(s).
<newSW>: Fw 7.3.0
<newBL>: Bl 9.2
<newDOD>: CLM Demo Device V2.2.8
<END>: 1607604082
Example of an UpdteLog.txt after a failed configuration update (e.g._due_to_an_incompatible_type)
<LogFileVersion>: 1.0
<BEGIN>: 1607604996
<actSW>: Fw 7.3.0
<actBL>: Bl 9.2
<actDOD>: CLM Demo Device V2.2.8
File Size: 2497
Received configuration file
ERROR: Job 0 (0x1018:0x2) -0x3337 is not equal to 0x5301
ERROR: Job 0 (0x1018:0x2) -0x3337 is not equal to 0x5301
ERROR: Job 0 (0x1018:0x2) -0x3337 is not equal to 0x5301
ERROR: ABORT CONFIGURATION DOWNLOAD AFTER 3 ATTEMPTS!
<newSW>: Fw 7.3.0
<newBL>: Bl 9.2
<newDOD>: CLM Demo Device V2.2.8
<END>: 1607605139
CAN¶
You can perform a configuration update using the CAN interface. To be able to load the configuration file to the device, the device must be connected via a CAN-USB port to a PC on which the configuration file is saved.
-
Connect the device to a PC. See Connecting the Device to the PC.
-
Load the configuration to the device. See Loading the Configuration to the Device via CAN Interface.
✓ You have completed the configuration update.
Firmware update¶
You can load a firmware update to the device by remote maintenance via the DataPlatform or the CAN interface.
Note
The firmware update via the Service Interface is no longer supported on devices running firmware version 4.0.0 or later. The deactivation is required to meet cybersecurity requirements in compliance with the RED directive. Devices shipped with firmware version 4.0.0 and above no longer support this functionality.
Perform a node scan in the Proemion Configurator to identify the currently installed firmware version. For detailed instructions, refer to Node Scan.
The firmware can be downloaded from our Download Center under: 03_Proemion Tools Software > 01_Software.
In case of problems, the Connectivity Check utility can be used to check the connectivity of our software tools with our services from your local network.
DataPlatform¶
It is recommended to use the Firmware Management in the DataPortal for the firmware update via the DataPlatform.
The DataPortal firmware management feature provides access to the latest released firmware as well as previous versions.
When updating devices, ensure that all required intermediate versions are installed in the correct order to avoid errors. Some firmware versions are required meaning they must be installed before newer versions can be applied.
In the DataPortal, navigate to Settings → Firmware and Configuration Updates and click on Detailsat the end of the row to check if a firmware version is required.
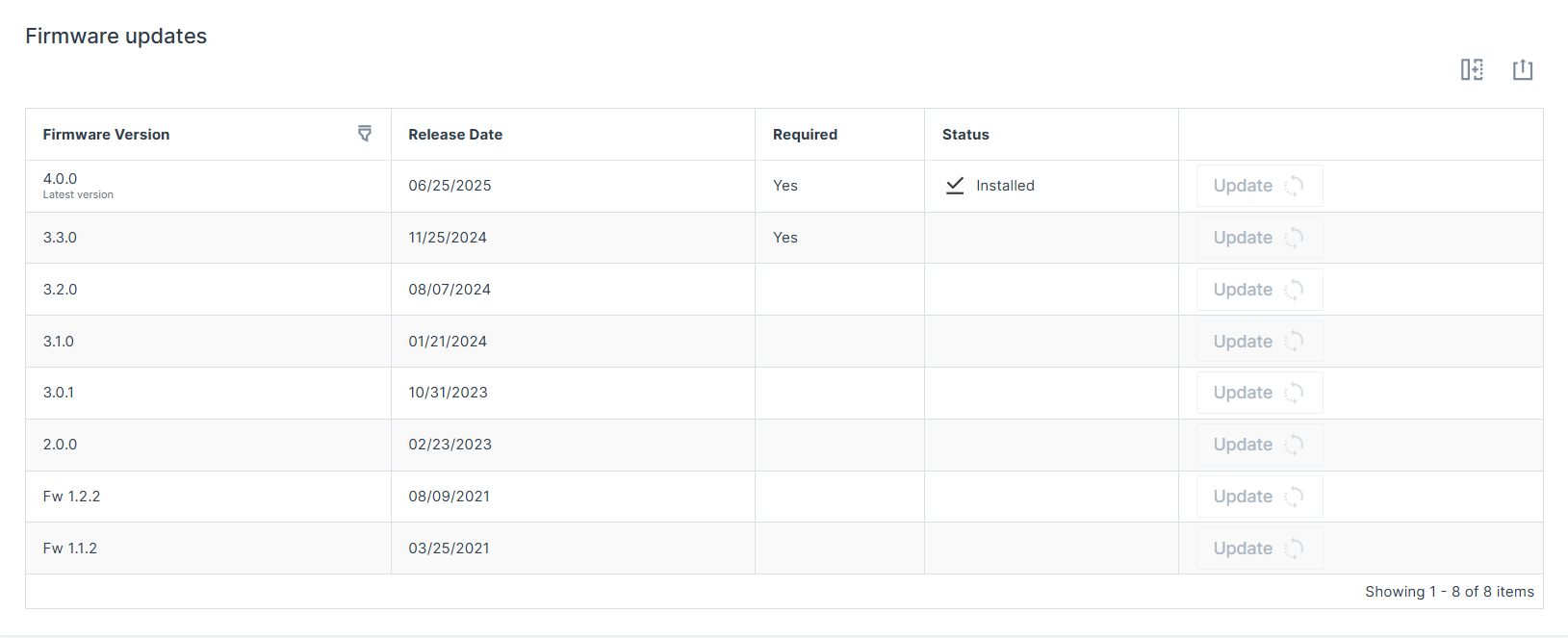
For example, a device running firmware version 3.2.0 cannot be updated directly to version 4.0.0. Version 3.3.0 is required and must be installed first.
Note
As of firmware release version 4.0.0, downgrading to an earlier firmware version via the DataPlatform (FOTA) is generally no longer possible. This limitation is implemented to meet the cybersecurity requirements under the Radio Equipment Directive (RED).
CAN¶
In order to load the firmware update (*.bin) on the device via the CAN interface, the device must be connected to a PC via a CAN-USB connection. The Proemion Firmware Programmer software must be installed on the PC and the firmware update stored.
-
Connect the device to a PC. See Connecting the Device to the PC.
-
Start the Proemion Firmware Programmer software.
-
Click on FILE > OPEN in the menu and navigate to the memory path for the firmware update (*.BIN).
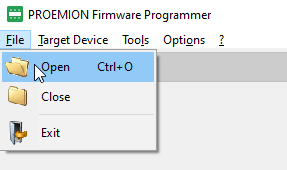
Figure 2: Firmware Update - Open Firmware File -
In the Open FwBin window, select the firmware update (
*.bin) and click on the OPEN button. -
In the main window, click on OPTIONS > COMMUNICATION SETTINGS in the menu.
✓ The COMMUNICATION SETTINGS window opens:
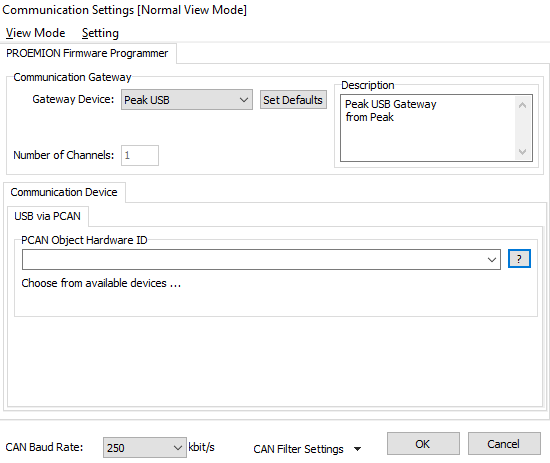
Figure 3: Firmware Update - Communication Settings -
In the COMMUNICATION GATEWAY section, select the device PEAK USB in the GATEWAY DEVICE field.
-
In the Communication Device section, select the PCAN Object Hardware ID.
-
At the bottom of the Communication Settings window, check for the correct CAN baud rate. The default CAN baud rate is 250 kbit/s.
-
Click OK to save the settings. You return to the main window:
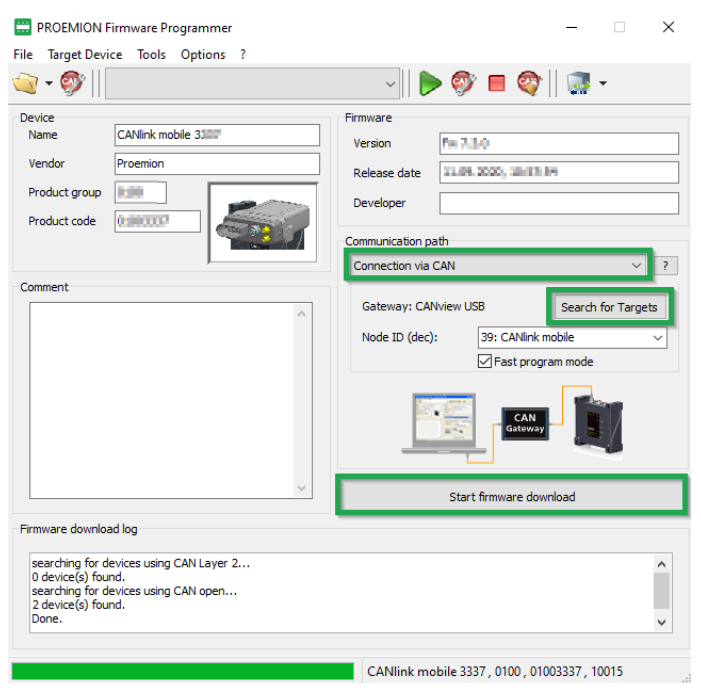
Figure 4: Firmware Update - Progress -
In the list in the COMMUNICATION PATH field, select the interface CONNECTION VIA CAN.
-
Click on the SEARCH FOR TARGETS button.
✓ The device's node ID is adopted.
-
The device's node ID is adopted.
-
Start firmware download.
-
Wait until the update is finished.
✓ During the firmware update, the LEDs light up green in the same sequence.
✓ In the field FIRMWARE DOWNLOAD LOG, the message FIRMWARE DOWNLOADED SUCCESSFULLY appears when the firmware update is complete.
✓ The device restarts automatically.
✓ After the restart, the device uses the updated firmware version.
You can find a tutorial on how to install the firmware to the device in the download section of our website. See Service and Support.
Diagnosis via Micro-USB Port¶
For diagnosis purposes, you can connect the device to a PC directly via the micro-USB (type_B) cable and record a debug log by using the CANlink mobile 3000 DeviceAnalyzer software.
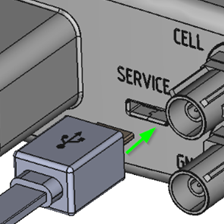
Note
The required USB – Micro USB type B cable is a standard cable which is available in every electronics store.
![[MicroUSB Type B cable]](../images/MicroUSB_TypeB_cable.png)
Risk of property damage
Pay attention that the USB plug is connected according to the correct assignment and without the need for any excessive force.
Improper connection or excessive force can damage the USB port and render the device seal ineffective.
Note
The connection via the micro-USB port is not suitable for carrying out a configuration update.
For detailed information on how to carry out a configuration update, see Chapters Safe Remote Updates Guideline and Configuration Update.
Recording the Debug Log¶
-
Install the following software from the Download Center:
CANlink® mobile 3000 DeviceAnalyzer Setup.exeunder:03_Proemion Tools Software > 01_Software > 08_CANlink mobile 3000 DeviceAnalyzer- and the USB driver under:
05_Utilities > 06_USB Drivers
-
Connect the device to a PC using the USB cable (USB-A to micro-USB-B, 1.6 m).
- Connect the device to the power supply.
- Read the instructions given in chapter 3.2 Debug Log in the CANlink® mobile 3000 DeviceAnalyzer software manual, available in the Download Center under
03_Proemion Tools Software > 01_Software > 00_Documentation. - If required, send the generated
*.glogfile to the support team for further analysis.
Device Reset¶
Performing a device reset returns the device to the original settings.
Severely restricted functions due to device reset
Incomplete configuration on the device. Repairs necessary by Proemion.
- Only trained personnel may carry out a device reset.
Complete data loss due to device reset
All logged data is deleted from the device memory.
- Back up your data before a device reset.
Note
During the Device Reset process, the ON LED flashes orange, and the Status LED lights up orange.
Device Reset via CAN¶
The following table provides an overview of the various reset options available which can be triggered via the CAN interface:
| Function | Index | Subindex | Description |
|---|---|---|---|
| Revert to Factory Configuration1 | 0x1011 |
0x01 |
The factory configuration is restored. All logged data is deleted. |
| Delete All Log Files | 0x1011 |
0x62 |
All logged data stored on the device is deleted. |
| Revert to Firmware Defaults Remote | 0x1011 |
0x63 |
The Standard configuration1 of the current firmware is restored. All logged data is deleted. CAN, Wi-Fi®, Bluetooth and Cellular parameters as well as the factory configuration are retained. |
| Revert to Firmware Defaults plus Format Remote | 0x1011 |
0x64 |
The standard configuration of the current firmware is restored. All logged data and the factory configuration are deleted. CAN, Wi-Fi®, Bluetooth and Cellular parameters are retained. |
| Revert to Firmware Defaults Local | 0x1011 |
0x65 |
The standard configuration of the current firmware is restored. All logged data and parameters are deleted. The factory configuration is retained. |
In order to complete a device reset via the CAN interface, a CANopen software (e.g. CANopen Magic) and a communication gateway (e.g. PCAN-USB - CAN/USB Interface) are required.
The CANopen software writes the value 0x64616F6C to the CANopen object index 0x1011 to trigger a specific reset variant.
In the following example, the device reset using the sub-index 0x65 (Revert to Firmware Defaults Local) is shown:
-
Connect the device to a PC. See Chapter Connecting the Device to the PC.
-
Start the selected CANopen software.
-
Perform the required steps in the CANopen software to write the value
0x64616F6Cto the object index,0x1011subindex0x65. -
Write the value to the device's object directory.
-
Wait until the device sends the CANopen bootup message to the IDs
0x727and0x728.
✓ The device reverts to the firmware defaults (object 0x1011;_0x65).
✓ The ON LED lights up green.
✓ The STATUS LED lights up blue.
✓ The device has adopted the firmware defaults (CAN Baud Rate 250 kbit/s, CANopen Node ID 39 etc.).
Note
When a Device Reset is being performed, the ON LED flashes in a magenta color and the Status LED orange. For more information on the LED status indications, see Indicator Elements.
You can find a tutorial on how to perform a device reset in the download section of our website. See also Chapter Service and Support.
Device Reset via USB Connector Cable/Diagnosis¶
The device reset via the USB connector cable (diagnosis) using the CANlink® mobile 3000 DeviceAnalyzer software is an alternative method to reset the device. Since a reset via the starter cable is not always possible, this option is particularly relevant for CANlink® mobile 3600 Variants.
For further information, refer to the CANlink® mobile 3000 DeviceAnalyzer software manual in the Download Center under: 03_Proemion Tools Software > 01_Software > 00_Documentation.
The installation files can be found under: 03_Proemion Tools Software > 01_Software > 08_CANlink mobile 3000 DeviceAnalyzer.
-
Difference between Factory configuration and Standard configuration:
Factory configuration: With the end-of-line tests (EOL test), Proemion loads a standard configuration (
DOD.bin_file) into the file system of the device. This configuration is called Factory configuration. The content of this file is activated in the device by using the object0x1011, subindex0x01. The factory configuration can be easily overwritten by the customer via the object0x3333, subindex0xF0. This makes it easy for customers to define and install their own configuration as the "factory configuration". If there is no file in the file system, the device configuration will not be changed, but the logged data will always be deleted.Standard configuration: Each firmware version has its own default values in the code for non-volatile configuration parameters. These default values are loaded automatically for fresh devices, for example. The default values of the firmware are loaded via the object
0x1011, subindex0x63. In contrast to the factory configuration, the standard values cannot be changed by customers. These are fixed values in the code memory. ↩↩
Troubleshooting
Introduction¶
The following sections contain information on solving problems and on maintenance.
Risk of property damage
Do not open the device housing unless you are explicitly instructed to do so. Use only approved tools and follow the specified procedures. Unauthorized opening may damage the device and may affect warranty coverage. The device must be inspected and repaired only by trained Proemion service technicians. Contact our Service and Support.
Remedies¶
| Problem | Possible cause |
|---|---|
| Device does not function. | Check the power supply via the main plug connector (terminal_30, terminal_31, terminal_15). |
| Device does not receive CAN messages | Check the CAN connection and the configuration of the CAN messages. Check whether the bus terminating resistor is correctly mounted. |
| Device does not receive GNSS signals. | Check the antenna connection and cable for damage. Position the antenna or the device so that it directly points to the sky. |
| Device does not receive a Cellular signal. | Check the antenna connection and cable for damage. Check the eSIM configuration in the eSIM - Specials object dictionary. Position the antenna or the device so that it directly points to the sky. |
| Device does not log data. | Check the CAN baud rate in the configuration. Check in the configuration whether the device is in "Operational" mode. Check the logging configuration. |
| Device with integrated battery does not initialize after switching on or firmware update. | Use a suitable tool to press the reset button on the main plug connector to restart the device. |
Support Request¶
Tip
The software tool for further troubleshooting is the CANlink mobile 3000 Device Analyzer software. This software can be downloaded from our Document Library.
The CANlink mobile 3000 DeviceAnalyzer Setup.exe for the software can be found in folder 03_Proemion Tools Software\01_Software\08_CANlink mobile 3000 DeviceAnalyzer.
The manual for the software can be found in folder 03_Proemion Tools Software\01_Software\00_Documentation.
If you do not find the solution to your problem in this manual, please contact our support team. See chapter Service and Support.
The support team requires the following information to help you:
-
Connect the USB Connector Cable - Diagnostic to your PC and create a device log with the CANlink mobile 3000 DeviceAnalyzer software when the problem appears. While the device log is recorded, click on Restart. This will allow the support team to also evaluate the initialization phase of the device.
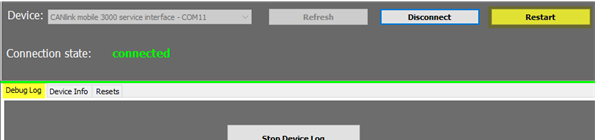
-
Read out all device and security variables with the CANlink mobile 3000 DeviceAnalyzer.
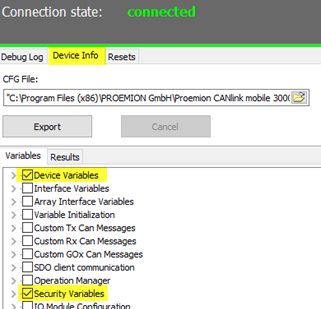
-
What is the condition of the status LED after the restart was triggered by the DeviceAnalyzer software? If possible, create a video of the status LEDs in addition to the device log including the restart.
-
Send the device log, the video of the status LEDs and the required output about the device and security variables by creating a ticket at Support.
Connection Problems to the DataPlatform¶
If the device cannot establish a connection to the DataPlatform, check the following:
-
Has the configuration been correctly loaded on the device? See chapter Configuration update.
-
Are the device LEDs lighting up correctly? See Chapter Indicator elements (LED).
-
Are the contract and device settings in the DataPortal correct?
-
Are the configured mobile communication parameters within the device configuration correct?
You can find more information in the following chapter.
DataPortal¶
Check that the contract and device settings in the DataPortal are correct.
-
Login at the DataPortal.
-
Click on Administration.
-
Click on Overview.
-
Click on COMMUNICATION UNITS.
-
Enable the checkbox Include sub-organizations.
-
Enter the device name or machine name in the corresponding search box.
-
Check in the machine column if the correct/expected machine name is displayed.
-
Check the Organization column if the device is allocated to the correct organization unit.
-
Click on the DETAILS button of the corresponding communication unit.
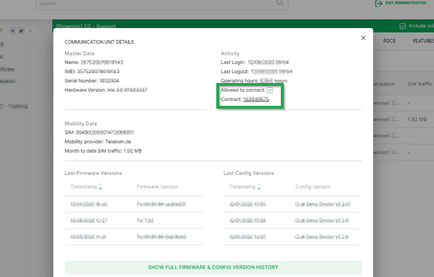
✓ The detail view of the selected device is displayed.
-
Click on the contract number from the contract field to check in the contract overview if the device has a valid contract.
✓ The contracts view of the selected device is displayed.
-
Click on Details.
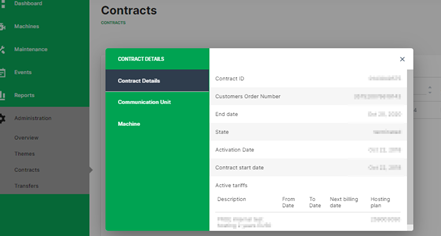
✓ The contract details of the selected contract are opened.
-
Check the contract details for the correct settings.
-
The settings for the communication unit and machine can also be checked in this window.
Device Configuration¶
Check if the mobile communication parameters in the Proemion Configurator are correct. The variables belong to the Security Variables group. You may use the tables below as a copy/paste template for the information to the support team.
-
Establish a physical CAN connection with a supported gateway device.
-
Start the Proemion Configurator software.
-
Select the correct gateway device and com port in the communication settings.
-
Open the corresponding device configuration file.
-
Open the tab Specials.
-
Read out the configured Security Variables according to the table below and make a note for later reference. If there are security variables missing in the used device configuration, they can be added with a right mouse click onto the tree element
Security Variables.Security Variable Default Value with Proemion eSIM card Read value Remote Server Address gateway.proemion.comRemote Server Port 61200Enable encrypted data transfer 1Online Mode Handling 1[E-SIM] SIM PIN empty [E-SIM] Roaming Handling 1[E-SIM] Operator Selection Mode 0[E-SIM] Operator Selection Code 0[E-SIM] DNS1 [empty][E-SIM] DNS2 [empty][E-SIM] ISP Username [empty][E-SIM] ISP Password [empty][E-SIM] APN iot.truphone.com1[E-SIM] SMS Service Center Address +491710760000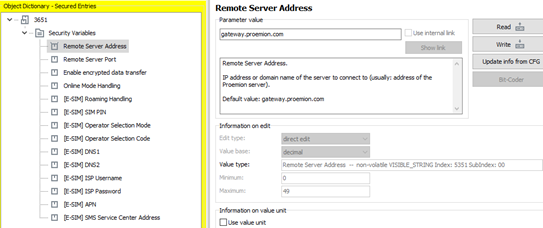
-
Open the Application tab in your configuration.
-
Read out the device variables according to the table below. If there are device variables missing in the used configuration, they can be added by right mouse click onto the object dictionary group Device Variables.
Device Variable Default Value Read value Mobile - Disconnect Mode (embedded_SIM) 1Mobile - Signal Quality (read-only) Mobile - Network State (read-only) Mobile - Modem Result (read-only) Mobile - Network Mode Select 0 Mobile - Network Mode Current (read-only) Mobile - Antenna Status (read-only) Mobile - failure reconnect delay 30 Mobile - State Machine current state code (read-only) Mobile - State Machine Error Code (read-only) Mobile - CMS Error Number (read-only) Mobile - CME Error Number (read-only) Mobile - SIM pin error flag (read-only) Mobile - Engine IMEI Number (read-only) Mobile - SIM Card ID (ICCID) (read-only) Mobile - Active Network Provider (read-only) Mobile - Local IP Address (read-only) Mobile - Engine Version (read-only) Mobile - Maximum Cellular Receive Delay 5000 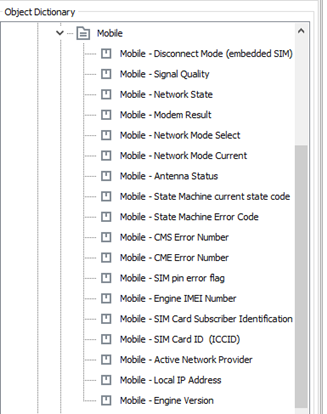
-
Provide the tables with the read-out values to the Proemion support.
Tip
The software tool for further troubleshooting is the CANlink mobile 3000 Device Analyzer software. For Further information on it, please refer to Diagnosis via Micro-USB Port and Support Request.
If you do not find the solution to your problem in this manual, please contact our Proemion support. See also Chapter Service and Support.
Device Configuration for 1Global SIM¶
Follow steps 1. to 9. as described in Device Configuration above, but use the following Security Variables for devices with 1Global SIM cards.
Note
The ICCID of these SIM cards starts with 894447.
| Variable | Value |
|---|---|
| APN | iot.truphone.com |
| SMS Service Center Address | [blank] |
| Roaming Handling | 1 |
| All other settings | [blank] |
Device Configuration for Nano-SIM Türkiye¶
Follow steps 1. to 9. as described in Device Configuration above, but use the following Security Variables for devices with Nano-SIM Türkiye SIM cards.
Note
The ICCID of these SIM cards starts with 899001.
| Variable | Value |
|---|---|
| APN | internet |
| SMS Service Center Address | [blank] |
| Roaming Handling | 1 |
| All other settings | [blank] |
Device Configuration for Nano-SIM Brazil¶
Follow steps 1. to 9. as described in Device Configuration above, but use the following Security Variables for devices with Nano-SIM Brazil SIM cards.
Note
The ICCID of these SIM cards starts with 893204.
| Variable | Value |
|---|---|
| APN | bicsapn |
| SMS Service Center Address | [blank] |
| Roaming Handling | 1 |
| All other settings | [blank] |
-
The APN is preconfigured for Proemion eSIM cards and should not be modified unless explicitly instructed by Proemion support. ↩
Maintenance¶
Check all connectors for a firm connection regularly.
Check the state of the integrated battery. If the battery is totally discharged or has reached the maximum number of 500 charge cycles, contact the Proemion Support.
Risk of property damage
Do not open the device housing unless you are explicitly instructed to do so. Use only approved tools and follow the specified procedures. Unauthorized opening may damage the device and may affect warranty coverage. The device must be inspected and repaired only by trained Proemion service technicians. Contact our Service and Support.
For more information on the integrated battery, see chapter battery.
Cleaning¶
Risk of property damage
Damage to the device due to water penetration
-
The device was tested against water jets according to IPxK5 of ISO 20653 standard. Different loads, e.g., with a pressure washer or a higher flow rate, do not correspond to the intended use.
-
Never clean the CANlink mobile device with a pressure washer or similar.
To avoid damage caused by liquid ingress, no high-pressure cleaners may be used for cleaning. In order to remove contamination, you should also avoid using jet water if possible. Instead, use a damp cleaning cloth with a solvent-free and acid-free cleaning liquid. Make sure the device is mounted as recommended to avoid liquid ingress, see Mounting Orientation.
Warranty Void Sticker¶
To verify if the device has been opened by unauthorized personnel, there is a warranty void sticker on the GH1208 housings (not applicable for GH1209 housings) as shown in the figures below.

Service Sticker¶
The USB socket is covered by a service sticker to provide some additional protection from soiling and water penetration. Please note that this sticker has no additional relevance for the IP protection class.


Packaging and Transport¶
This chapter contains information on packing and transportation.
Risk of property damage
-
Only store and transport the device in a temperature range of -40 °C … +85 °C / -40 °F … +185 °F.
-
For devices with an integrated battery, only store and transport the device in a temperature range of -20 °C … +60 °C / -4 °F … +140 °F.
-
Protection class IP6K7 is only ensured when all connectors are properly sealed using protection caps.
-
Close all connectors with protection caps.
Lithium-polymer battery transport
According to applicable transport regulations for lithium batteries, devices containing such batteries, or their packaging, must be specially labeled.
Prior to shipping, please contact our Service and Support.
- Only ship the device in appropriately labeled packaging.
Disposal¶
This chapter contains information on correct disposal.
Regulations in the European Union¶
Note
Observe local regulations for disposal of the device, the accessories and the packaging material.
 |
According to the Directive on Waste Electrical and Electronic Equipment (WEEE), the device must not be disposed of in household waste. The device contains a lithium-polymer battery which can contain toxic and polluting heavy metals. Take the device to a collection point for waste electrical and electronic equipment for correct disposal. |
Environmental damage due to lithium-polymer battery
According to the valid transport regulations for lithium batteries, devices containing such batteries, or their transport packaging must be specially labeled.
Prior to shipping, please contact our Service and Support.
- Only ship the device in a packaging that is appropriately labeled on the outside.
Regulatory and Compliance
Conformity¶
The device meets the requirements of the following standards and legal requirements.
The device is designed to be used in systems that must comply with applicable legal and regulatory requirements prior to commissioning.
The system integrator is responsible for ensuring that all applicable local laws, regulations, and provisions are observed.
| Symbol | Declaration of Conformity |
|---|---|
 |
Simplified CE Declaration of Conformity Hereby, Proemion declares that the radio equipment Models CANlink mobile 3677 and CANlink mobile 3617 are in compliance with Directive 2014/53/EU. |
 |
E1 Compliant This device has been approved by the KBA (Kraftfahrtbundesamt, Federal Office for Motor Traffic) as compliant with Regulation No. 10. ECE Regulation No. 10 (Rev. 5) Approval number: 10R-05 8436 |
 |
Simplified UK Declaration of Conformity Hereby, Proemion declares that the radio equipment Models CANlink mobile 3677 and CANlink mobile 3617 are in compliance with the Radio Equipment Regulations 2017 (S.I. 2017/1206). |
 |
ISED Compliant This device complies with the applicable directives, standards, and normative documents. |
 |
FCC Compliant This device complies with Part 15 of the FCC rules. Operation is subject to the following conditions: The device may not cause harmful interference. The device must accept any interference received, including interference that may cause undesired operation. |
 |
ANATEL compliant for Brazil Incorporates product approved by Anatel under number 02828-19-07968. Incorpora produto homologado pela Anatel sob número 02828-19-07968. Para maiores informações, consulte o site da ANATEL www.anatel.gov.br Este equipamento não tem direito à proteção contra interferência prejudicial e não pode causar interferência em sistemas devidamente autorizados. |
 |
TELEC compliant for Japan This device is certified under business law  AD190040201 and radio law AD190040201 and radio law  R201-190133. The Model CANlink mobile 3677 is additionally certified under radio law R211-210212 and utilizes the 5GHz band (W52, W53): For indoor use only. R201-190133. The Model CANlink mobile 3677 is additionally certified under radio law R211-210212 and utilizes the 5GHz band (W52, W53): For indoor use only. |
 |
CONATEL compliant for Paraguay The Model CANlink mobile 3677 is certified under CONATEL NR: 2022-02-I-0091. The Model CANlink mobile 3617 is certified under CONATEL NR: 2022-02-I-0090. |
 |
KC compliant for Korea CANlink mobile 3677 Types 3630, 3633, and 3673: 기자재의 명칭: 특정소출력무선기기(무선데이터통신시스템용_무선기기) CANlink mobile 3617 Types 3610, 3611, 3613, 3651, and 3653: 기자재의 명칭: LTE 이동통신용 무선설비의 기기(기타) CANlink mobile 3677 Types 3630, 3633, 3673: 인증번호: R-C-pRo-CLM3677 CANlink mobile 3617 Types 3610, 3611, 3613, 3651, and 3653: 인증번호: R-R-pRo-CLM3617 적합성 평가를 받은 자의 상호: 프로이미온 유한회사 제조자/제조국가: Proemion GmbH / 독일 * 승인받은 모듈의 인증번호: R-C-QUT-EG25-G |
The full text of the declarations of conformity, as well as further certificates (e.g. FCC and Bluetooth SIG), are available at our website Declarations of Conformity (DoC)for CANlink® mobile 3600 series.
Go to 01_Proemion_Devices > 01_CANlink mobile 3600 > CANlink mobile 3600 Radio Type Approvals Country List.pdf in the Download Center for a full list of countries where CANlink® mobile 3600 devices have a radio approval.
CE Notes European Union¶
The devices described in this device manual may only be used in mobile or stationary systems in which the distance between antennas and persons is at least 20 cm. Furthermore, antennas may only be operated in conjunction with other antennas or transmitters when the correct horizontal distance between them is observed.
Loss of CE conformity is possible.
Only use antennas with a maximum antenna gain (incl. cable and connector loss) of:
CANlink mobile 3651, 3653, 3657, 3673, 3677:
2.98dBi (GSM)
2dBi (DCS)
1.53dBi (WCDMA B1)
2.98dBi (WCDMA B8)
2.29dBi (WCDMA B5)
1.53dBi (LTE B1)
2dBi (LTE B3)
2.29dBi (LTE B5)
3dBi (LTE B7)
2.98dBi (LTE B8)
2.64dBi (LTE B20)
3.95dBi (LTE B28)
2.06dBi (LTE B38)
1.88dBi (LTE B40)
Loss of CE conformity is possible.
The allowed maximum equivalent isotropically radiated power (EIRP) according to ETSI for Bluetooth is:
Types 3630, 3633, 3673, 3637, 3677:
- Bluetooth Classic: max. 9.76dBm at 2.402 - 2.480 GHz
- Bluetooth LE: max. 9.98dBm at 2.402 - 2.480 GHz
Loss of CE conformity is possible.
The allowed maximum equivalent isotropically radiated power (EIRP) according to ETSI for Wi-Fi® is:
Types 3630, 3633, 3673, 3637, 3677
- max. 18.58dBm at 2.412 - 2.472 GHz
- max. 19.62dBm at 5.150 - 5.350 GHz
- max. 17.64dBm at 5.470 - 5.725 GHz
- max. 13.88dBm at 5.725 - 5.785 GHz
Changes or modifications to this device not expressly approved by the manufacturer can void the user's authority to operate the device under CE rules.
Loss of CE conformity is possible.
Applicable for CANlink mobile variants with Wi-Fi® interface (3633, 3637, 3673, 3677):
This device is restricted to indoor use only when operating Wi-Fi® channels in the frequency range 5150 to 5350 MHz for the following countries:

UKCA Notes United Kingdom¶
The devices described in this device manual may only be used in mobile or stationary systems in which the distance between antennas and persons is at least 20 cm. Furthermore, antennas may only be operated in conjunction with other antennas or transmitters when the correct horizontal distance between them is observed.
Loss of UKCA conformity is possible.
Only use antennas with a maximum antenna gain (incl. cable and connector loss) of:
CANlink mobile 3651, 3653, 3657, 3673, 3677:
2.98dBi (GSM)
2dBi (DCS)
1.53dBi (WCDMA B1)
2.98dBi (WCDMA B8)
2.29dBi (WCDMA B5)
1.53dBi (LTE B1)
2dBi (LTE B3)
2.29dBi (LTE B5)
3dBi (LTE B7)
2.98dBi (LTE B8)
2.64dBi (LTE B20)
3.95dBi (LTE B28)
2.06dBi (LTE B38)
1.88dBi (LTE B40)
Loss of UKCA conformity is possible.
The allowed maximum equivalent isotropically radiated power (EIRP) according to ETSI for Bluetooth is:
Types 3630, 3633, 3673, 3637, 3677:
- Bluetooth Classic: max. 9.76dBm at 2.402 - 2.480 GHz
- Bluetooth LE: max. 9.98dBm at 2.402 - 2.480 GHz
Loss of UKCA conformity is possible.
The allowed maximum equivalent isotropically radiated power (EIRP) according to ETSI for Wi-Fi® is:
Types 3630, 3633, 3673, 3637, 3677
- max. 18.58dBm at 2.412 - 2.472 GHz
- max. 19.62dBm at 5.150 - 5.350 GHz
- max. 17.64dBm at 5.470 - 5.725 GHz
- max. 13.88dBm at 5.725 - 5.785 GHz
Changes or modifications to this device not expressly approved by the manufacturer can void the user's authority to operate the device under UKCA rules.
Loss of UKCA conformity is possible.
Applicable for CANlink mobile variants with Wi-Fi® interface (3630, 3633, 3637, 3673, 3677):
This device is restricted to indoor use only when operating Wi-Fi® channels in the frequency range 5150 to 5350 MHz for the following countries:

FCC Notes USA¶
The devices described in this device manual may only be used in mobile or stationary systems in which the distance between antennas and persons is at least 20 cm. The antennas must further not be co-located or operated in conjunction with any other antennas or transmitters.
Changes or modifications to the device not expressly approved by the manufacturer can void the user's authority to operate the device under FCC rules.
Note
This device has been tested and found to comply with the limits for a Class B digital device pursuant to part 15 of the FCC rules.
These limits are designed to provide adequate protection against harmful interference in a residential installation.
This device generates, uses, and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause interference to radio communications. There is no guarantee that interference will not occur in a particular installation.
If this device does cause interference to radio or television reception, which can be determined by switching the device on and off, the user is advised to try to correct the interference by one or more of the following measures:
- Realign the receiving antenna or put it in a different place.
- Increase the distance between the device and the receiver.
- Connect the device and the receiver to different supply circuits.
- Consult the dealer or an experienced radio/TV technician for help.
Loss of FCC certification possible.
Only use antennas with a maximum antenna gain of:
CANlink mobile 3651, 3653, 3657, 3673, 3677, 3677:
- 8dBi in WCDMA Band 2/LTE Band 2/7/25/38/41
- 5dBi in WCDMA /LTE Band 4
- 8.6dBi in GSM850
- 10.19dBi in PCS1900
- 9.42dBi in WCDMA Band 5
- 9.41dBi in LTE Band 5
- 8.7dBi in LTE Band 12
- 9.16dBi in LTE Band 13
- 9.36dBi in LTE Band 26(814-824)
- 9.41dBi in LTE Band 26(824-849)
ISED Notes Canada¶
English
This product meets the applicable Innovation, Science and Economic Development Canada technical specifications.
This Class B equipment complies with the applicable ISED RSSs Standards and CAN ICES-003 Issue 6. Operation is subject to the following two conditions:
(1) This device may not cause interference, and
(2) This device must accept any interference, including interference that may cause undesired operation of the device.
Radiation Exposure Statement
This device complies with radiation exposure limits prescribed for an uncontrolled environment for fixed and mobile use condition. This equipment should be installed and operated with minimum distance of 20cm between the radiator and the body of the user or nearby persons.
Maximum Cellular Antenna Gain
CANlink mobile 3651, 3653, 3657, 3673, 3677: The maximum antenna gain including cable and connector loss in a fixed or mobile exposure condition must not exceed +5dBi for all applicable GSM (850, 1900), WCDMA (2, 4, 5) and LTE (2, 4, 5, 7, 12, 13, 25, 26, 38, 41) Bands.
Changes or modifications to this device not expressly approved by the manufacturer can void the user's authority to operate the device under ISED rules.
Harmful interference.
Applies to CANlink mobile 3630, 3633, 3637, 3673, 3677
This device is restricted to indoor operation only in the band 5150-5250 MHz. to reduce the potential for harmful interference to co-channel mobile satellite systems. However, original equipment manufacturer (OEM) devices, which are installed in vehicles by vehicles manufacturers, are permitted.
The high-power radars are allocated as primary users (i.e., priority users) of the bands 5250-5350 MHz and 5650-5850 MHz and that these radars could cause interference and/or damage to this device.
This device is not capable of transmitting in the band 5600-5650 MHz in Canada.
Français
Ce produit est conforme aux spécifications techniques applicables d'Innovation, Sciences et Développement Économique Canada.
Cet équipement de classe B est conforme aux normes ISDE RSS applicables et à la norme CAN ICES-003, Numéro 6. Son fonctionnement est soumis aux deux conditions suivantes:
(1) Cet appareil ne doit pas provoquer d'interférences et
(2) Cet appareil doit accepter toute interférence, y compris les interférences qui peuvent provoquer un fonctionnement indésirable de l'appareil.
Déclaration d'exposition aux rayonnements
Cet appareil est conforme aux limites d'exposition aux rayonnements prescrites pour un environnement non contrôlé dans des conditions d'utilisation fixe et mobile. Cet équipement doit être installé et utilisé à une distance minimale de 20 cm entre le radiateur et le corps de l'utilisateur ou des personnes à proximité.
Gain d'antenne cellulaire maximal
CANlink mobile 3651, 3653, 3657, 3673, 3677: Le gain d'antenne maximal, y compris les pertes du câble et du connecteur dans des conditions d'exposition fixe ou mobile, ne doit pas dépasser +5 dBi pour toutes les bandes GSM (850, 1900), WCDMA (2, 4, 5) et LTE (2, 4, 5, 7, 12, 13, 25, 26, 38, 41).
Les changements ou modifications de cet appareil non expressément approuvés par le fabricant peuvent annuler le droit de l'utilisateur à utiliser l'appareil selon la réglementation ISDE.
Interférences nuisibles
S'applique au CANlink mobile 3630, 3633, 3637, 3673, 3677
Cet appareil est limité à un fonctionnement en intérieur uniquement dans la bande 5150-5250 MHz pour réduire le potentiel d'interférences nuisibles aux systèmes mobiles par satellite sur le même canal. Toutefois, les dispositifs de fabricant d'équipement d'origine (OEM), qui sont installés dans les véhicules par leurs constructeurs, sont autorisés.
Les radars haute puissance sont considérés comme utilisateurs principaux (c'est-à-dire utilisateurs prioritaires) des bandes 5250-5350 MHz et 5650-5850 MHz et ces radars pourraient causer des interférences et/ou endommager cet appareil.
Cet appareil n'est pas capable d'émettre dans la bande 5600-5650 MHz au Canada.
Compliance Notes Ukraine¶
Пристрій працює в наступних діапазонах частот і максимальної вихідної потужності:
| технології | робоча частота | вихідна потужність |
|---|---|---|
| E-GSM/GSM-900/GSM-1800 | 880,1 – 915 / 925,1 - 960 МГц 1710 – 1785 / 1805 – 1880 МГц |
33 дБм (GSM-900); 30 дБм (GSM-1800) |
| IMT-2000 (UMTS) | 1920 – 1980 / 2110 – 2170 МГц (Band I) 888,8 – 906 / 933,8 – 951 МГц (Band VIII) |
24 дБм |
| E-UTRA Band 3 | 1710 - 1785 / 1805 – 1880 МГц | 23 дБм |
| E-UTRA Band 7 | 2510 - 2545 /2630 - 2665 МГц 2565 - 2570 / 2685 - 2690 МГц |
23 дБм |
| E-UTRA Band 8 | 888,8 - 906 / 933,8 - 951 МГц | 23 дБм |
| E-UTRA Band 20 | 832 - 842 / 791 - 801 МГц | 23 дБм |
| WLAN 2.4 + 5 GHz: IEEE802.11a/b/g/n (Model CANlink mobile 3677 only) |
2412 - 2472 МГц 5150 - 5350 МГц 5470 - 5725 МГц 5725 - 5785 МГц |
18,58 дБм 19,62 дБм 17,64 дБм 13,88 дБм |
| Bluetooth Classic Bluetooth LE (Model CANlink mobile 3677 only) |
2402,0 - 2480 МГц 2402,0 - 2480 МГц |
9,76 дБм 9,98 дБм |
NBTC Notes Thailand¶
-
The devices imported to Thailand must be labeled with the following label and these labels must be purchased from the regulatory authority NBTC by sending an email to erlicensing@nbtc.go.th:
![[NBTC Thailand]](../images/nbtc_thailand.png)
Figure 1: [NBTC Thailand] The NBTC-ID is:
- Model CANlink mobile 3617: B38831-24-XXXX
- Model CANlink mobile 3677: B38832-24-XXXX
where XXXX is a placeholder for the importer company ID issued by NBTC.
-
“เครื่องวิทยุคมนาคมนี้มีระดับการแผ่คลื่นแม่เหล็กไฟฟ้าสอดคล้องตาม มาตรฐานความปลอดภัยต่อสุขภาพของมนุษย์จากการใช้เครื่องวิทยุคมนาคมที่คณะกรรมการกิจการ โทรคมนาคมแห่งชาติประกาศกำหนด”
(This radio communication equipment has the electromagnetic field strength in compliance with the Safety Standard for the Use of Radio Communication Equipment on Human Health announced by the National Telecommunications Commission.)
-
Marking regarding regulation.
NCC Notes Nigeria¶
The Model CANlink mobile 3617 is Type Approved by NCC for Nigeria under CERT/00693/2024:

Warranty and Liability¶
Proemion assumes no liability for defects caused by normal wear, external influences and incorrect installation, operation or maintenance. This also applies if the customer or a third party modifies the devices, any accessories, or the software without permission from Proemion.
Annex¶
This chapter contains technical data and certificates.
Technical Drawings¶
Housing
The CANlink® mobile 3600 offers the GH1209 housing.
Find more detailed technical drawings in the Download Center under: 01Proemion_Devices > 01_CANlink mobile 3600 > 01_Documentation > Drawings.
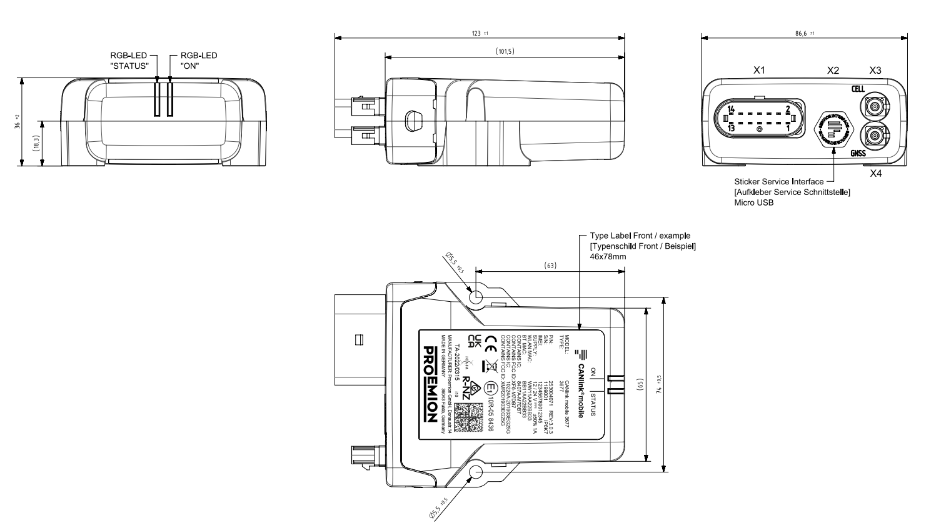
Technical Data¶
This chapter contains information on the technical data of the device.
Mechanical¶
| Parameter | Value |
|---|---|
| Dimensions width/height/depth [mm] | 86,6±1 / 123±1 / 36±1 |
| Color | Black |
| Protection class | IP6K7 |
| The protection class is only ensured if all connectors of the device are plugged in or covered with suitable protection caps. | |
| Temperature range | Standard mode: -40 °C ... +80 °C / -40 °F ... +176 °F |
| Battery operation: -20 °C ... +60 °C / -4 °F ... +140 °F | |
| Battery charging: 0 °C ... +45 °C / 32 °F ... +113 °F | |
| Please Note: With CANlink® mobile 3600 variants, Bluetooth, BLE and Wi-Fi® could have delayed connection times up to 10 Minutes at ambient temperatures lower than -20°C / -4°F | |
| Vibration | The CANlink® mobile 3600 was qualified referring to Standard EN 60068-2-6 with up to 10g. |
| Please Note: It is recommended that the device is installed in such a way that the actual load is significantly lower than the limit values during the qualification tests. | |
| Shock | The CANlink® mobile 3600 was qualified referring to Standard EN 60068-2-27 with up to 30g. |
| Please Note: It is recommended that the device is installed in such a way that the actual load is significantly lower than the limit values during the qualification tests. | |
| Altitude | The altitude during operation is limited to 2000m for all CLM 33xx/34xx/35xx/36xx devices. This requirement is part of the Electrical Safety Test for IEC 62368-1 |
| Weight | 36xx: 190 g |
| Standard housing material | PA 66/6 - FR |
| Pressure equalizing membrane | Yes |
| Resistance of the housing material to chemicals | The housing material of the device was successfully tested against the following liquids in accordance with the standard EN ISO 175. |
| - Exposure time: 24h - Temperature: 20°C, for Substances No. 5, 6, 7: 80°C - Rel. Humidity < 40% - Operating mode: Off | |
| 1. Gasoline | |
| 2. Diesel | |
| 3. Fast cleaner spray Tetrachlorethen | |
| 4. Ethanol | |
| 5. Chain adhesive lubricant | |
| 6. Hydraulic oil HLVP68 | |
| 7. Hydraulic oil biologic BP Bio SE 46 | |
| 8. Coca Cola | |
| 9. Cement CEM 1 DIN EN 197-1 „Quickmix" (Bauhaus) | |
| 10. Fertilizer NPK,Gardol Grünpflanzendünger 12-4-6 (Bauhaus) | |
| 11. Skin care Handsan Cream & Touch (dm) | |
| 12. Sunscreen "Sundance Sonnenmilch 20 mittel" (dm) 13. Cooler Antifreeze Type G12 | |
| 14. Window cleaner concentrate | |
| 15. Suds Rivolta BWR 210, 10:1 |
For more information on qualification tests and reports, refer to the Service and Support.
Electrical¶
| Parameter | Value |
|---|---|
| Supply voltage range terminal 30 DC | 12 / 24 V DC ±50 % |
| Battery voltage, battery operation | 3.7 V (internal) |
| Power consumption, with terminal 30 supply (24 V) | < 250 mA (standard mode) < 500 µA (sleep mode) |
| Power consumption, battery operation (3.7 V) | < 600 mA (standard mode) < 100 µA (sleep mode) |
| Average power consumption | < 4 W |
| Controller | Arm Cortex M4 168 Mhz |
| Memory expansion Program Flash | 1 MB |
| Data Flash memory expansion | 128 MB (Types 36xx) |
| Memory expansion FRAM | 8 kB (Types 36xx: 32 kB) |
| Memory expansion SRAM | 760 kB (Types 36xx: 1.2 MB) |
| LEDs | 2 LEDs, RGB (red/green/blue) |
| Keys | Types 3637, 3677: power-reset button in main plug connector |
| Battery | Lithium-polymer, 3.7 V; 1.15 Ah; 4.225 Wh |
| - Charge time: approx. 5 hours | |
| - Operating time: | |
| - approx. 1.5 h (standard mode) | |
| - approx. 14 days (24-hour cycle) | |
| - approx. 70 days (Sleep mode / Standby) | |
| RTC with back-up capacitor | Back-up time: 48 h at 25 °C |
| - Accuracy: ±2 s/day at 25 °C, -15 s/day at the lower and +2 s/day at upper temperature limit | |
| - Synchronization: GNSS/NTP/DataPlatform | |
| - Can be used as source for cyclic wakeup | |
| For the CANlink® mobile 3600 devices, the back-up capacitor is not assembled and the back-up time feature is not available from certain S/N onwards. Please see the referring PCN for CANlink mobile 3600 without SuperCap. |
Interfaces¶
| Parameter | Value |
|---|---|
| CAN (number, ISO) | CAN1: ISO 11898-2 |
| CAN2: ISO 11898-2, galvanically isolated | |
| CAN3: ISO 11898-2 (CAN-FD_ready) | |
| NOTE: CAN3 has a lower performance compared to CAN1/CAN2. | |
| CAN specification | 2.0 A/B |
| Max. CAN baud rate | 1000 kbit/s, 5 Mbit/s at CAN3 with firmware which supports CAN-FD |
| Cellular | 36xx: LTE/UMTS/GSM |
| Cellular frequency range | Types 36xx 3GPP Band Transmit Receive Unit |
| - GSM850 824~849 869~894 MHz | |
| - EGSM900 880~915 925~960 MHz | |
| - DCS1800 1710~1785 1805~1880 MHz | |
| - PCS1900 1850~1910 1930~1990 MHz | |
| - WCDMA B1 1920~1980 2110~2170 MHz | |
| - WCDMA B2 1850~1910 1930~1990 MHz | |
| - WCDMA B4 1710~1755 2110~2155 MHz | |
| - WCDMA B5 824~849 869~894 MHz | |
| - WCDMA B8 880~915 925~960 MHz | |
| - LTE-FDD B1 1920~1980 2110~2170 MHz | |
| - LTE-FDD B2 1850~1910 1930~1990 MHz | |
| - LTE-FDD B3 1710~1785 1805~1880 MHz | |
| - LTE-FDD B4 1710~1755 2110~2155 MHz | |
| - LTE-FDD B5 824~849 869~894 MHz | |
| - LTE-FDD B7 2500~2570 2620~2690 MHz | |
| - LTE-FDD B8 880~915 925~960 MHz | |
| - LTE-FDD B12 699~716 729~746 MHz | |
| - LTE-FDD B13 777~787 746~756 MHz | |
| - LTE-FDD B18 815~830 860~875 MHz | |
| - LTE-FDD B19 830~845 875~890 MHz | |
| - LTE-FDD B20 832~862 791~821 MHz | |
| - LTE-FDD B25 1850~1915 1930~1995 MHz | |
| - LTE-FDD B26 814~849 859~894 MHz | |
| - LTE-FDD B28 703~748 758~803 MHz | |
| - LTE-TDD B38 2570~2620 2570~2620 MHz | |
| - LTE-TDD B39 1880~1920 1880~1920 MHz | |
| - LTE-TDD B40 2300~2400 2300~2400 MHz | |
| - LTE-TDD B41 2496~2690 2496~2690 MHz | |
| Cellular transmission rate | - GPRS upload: 85.6 kbit/s |
| - GPRS download: 85.6 kbit/s | |
| - Edge upload: 236 kbit/s | |
| - Edge download: 236 kbit/s | |
| - UMTS upload: 384 kbit/s | |
| - UMTS download: 384 kbit/s | |
| - HSUPA upload: 5.7 Mbit/s | |
| CANlink mobile 36xx | |
| - HSDPA download 42 Mbit/s | |
| - LTE-FDD CAT 4 upload: 50 Mbit/s | |
| - LTE-FDD CAT 4 download: 150 Mbit/s | |
| - LTE-TDD CAT 4 upload: 30 Mbit/s | |
| - LTE-TDD CAT 4 download: 130 Mbit/s | |
| Maximum Cellular transmission power | CANlink mobile 3653, 3657, 3673, 3677: |
| - 33 dBm with GPRS | |
| CANlink mobile 3610, 3611, 3613, 3617, 3633, 3637: | |
| - 30 dBm with GPRS | |
| CANlink mobile all variants: | |
| - 27 dBm with Edge | |
| - 24 dBm with UMTS | |
| - 24 dBm with HSPA | |
| - 23 dBm with LTE | |
| Satellite systems supported | GPS/QZSS L1 C/A, GLONASS L10F BeiDou B1I, Galileo E1B/C @ Frequency Band 1559 -- 1608 MHz |
| - GNSS fix: cold start ≤30 s / warm start ≤1 s | |
| - Update rate: 1 Hz | |
| - Accuracy: ≤5 m (CEP, 50 %, 24 h static, -130 dBm, > 6 satellites in visual range) | |
| Bluetooth Standard | Types 3630, 3633, 3673, 3637, 3677 |
| - Bluetooth 5.0 | |
| Bluetooth frequency range | Bluetooth Classic: 2.402 - 2.480 GHz in 79 channels |
| Bluetooth LE: 2.402 - 2.480 GHz in 40 channels | |
| Bluetooth transmission rate | Bluetooth Classic: up to 3 Mbit/s Bluetooth 4.0: up to 1 Mbit/s Bluetooth 5.0: up to 2 Mbit/s |
| BLE performance | Single point 400 CAN messages per second (Server to Client) |
| Wi-Fi® Standard | Types 3630, 3633, 3673, 3637, 3677 |
| IEEE 802.11 abgn | |
| Wi-Fi® frequency range | - 2.400 - 2.4835 GHz (IEEE_802.11_b/g/n) in 13 channels |
| - 5.150 - 5.725 GHz (IEEE_802.11_a/n) in 24 channels | |
| Wi-Fi® transmission rate | IEEE 802.11a: to 54 Mbit/s |
| IEEE 802.11b: to 11 Mbit/s | |
| IEEE 802.11g: to 54 Mbit/s | |
| IEEE 802.11n: to 65 Mbit/s (planned) | |
| Wi-Fi® encryption | Types 3630, 3633, 3673, 3637, 3677 WPA/WPA2-Personal, WPA/WPA2 Enterprise for Client, EAP-TLS, EAP-FAST, EAP-TTLS, EAP-LEAP, PEAP-MSCHAP-v2 |
| USB | 1 micro-USB type A/B (12_MBit/s), 2.0 full speed, self-powered device |
| Digital OUT | 1 digital output |
| - Terminal 30 switching 6 VDC ... 36 VDC | |
| - max. output current: 500 mA | |
| - max. switch frequency: 10 Hz | |
| - Surge-proof up to 36 VDC | |
| - Reverse voltage protection up to -36 VDC | |
| Analog IN | 3 analog inputs |
| - Measurement range: 0 VDC to 15 VDC | |
| - Input resistance: 20 kΩ | |
| - Resolution: 12 bit | |
| - Sampling rate: 20 Hz | |
| - Surge-proof up to 53 VDC | |
| - Reverse voltage protection up to -53 VDC | |
| - Tolerance: ± 1 % of measurement range end value (at 25 °C) | |
| Terminal 15 | 1 digital / analog input |
| - Measurement range: 0 VDC to 78 VDC | |
| - Input resistance: 103 kΩ | |
| - Resolution: 12 bit | |
| - Sampling rate: 20 Hz | |
| - Digital switching threshold: 5.5 VDC (hysteresis 2.3 VDC) | |
| - Surge-proof up to 100 VDC | |
| - Reverse voltage protection up to -100 VDC | |
| - Tolerance: ± 1 % of measurement range end value (at 25 °C) | |
| Terminal 30 | 1 analog input |
| - Measurement range: 0 VDC to 78 VDC | |
| - Input resistance: 103 kΩ | |
| - Resolution: 12 bit | |
| - Sampling rate: 20 Hz | |
| - Surge-proof up to 36 VDC | |
| - Reverse voltage protection up to -36 VDC | |
| - Tolerance: ± 1 % of measurement range end value (at 25 °C) | |
| Acceleration sensor | Measurement range: ±16 g |
| - Resolution: 16 bit | |
| - Sampling rate: <10 Hz | |
| - Tolerance: ≤2 % of measurement range end value and offset ±0.15 g (at 25 °C) | |
| (Sensor is not calibrated) | |
| Gyro sensor / Rate of rotation sensor | Measurement range: ±250 °/s |
| - Resolution: 16 bit | |
| - Sampling rate: <10 Hz | |
| - Tolerance: ≤3 % of measurement range end value and offset ±3 °/s (at 25 °C and 1 g) | |
| (Sensor is not calibrated) | |
| Temperature sensor | Measurement range: -40 °C ... +85 °C / -40 °F ... +185 °F |
| - Resolution: 0.1 °C | |
| - Sampling rate: 20 Hz | |
| - Tolerance: ±3 °C / ±5.6 °F | |
| (Sensor is not calibrated) |
Protocols¶
| Protocol | Available |
|---|---|
| Layer 2 | Yes |
| CANopen | Yes |
| J1939, OBDII | Yes |
| Customer-specific | On request |
| TCP | Yes |
| SDO client | Yes |
Status Indicators¶
| Available | Status indicator |
|---|---|
| All types | 2 RGB LEDs (ON_/_STATUS) |
Service and Support¶
The latest versions of the drivers, software, firmware, and documentation are available at Document Library.
Do you need help or want to report a bug?
Visit Proemion for more information, or raise a ticket via Support.
Firmware Updates and Support¶
To ensure the best performance and security of your devices, we strongly recommend always installing the latest firmware provided by Proemion.
Please note:
We do not provide technical support for issues caused by outdated firmware.
Errors resulting from outdated firmware are considered non-qualified errors and are not covered by warranty or support.
Regular firmware updates are essential to maintaining the functionality of your devices.
If you need assistance with the update process, please contact our Service and Support.
For more information on the Firmware Update, check the device manual of your device at the Document Library.